基于电磁感应传感器的智能车系统设计(单驱动)(CAD,程序,电路图)
来源:56doc.com 资料编号:5D11180 资料等级:★★★★★ %E8%B5%84%E6%96%99%E7%BC%96%E5%8F%B7%EF%BC%9A5D11180
资料以网页介绍的为准,下载后不会有水印.资料仅供学习参考之用. 密 保 惠 帮助
资料介绍
基于电磁感应传感器的智能车系统设计(单驱动)(CAD,程序,电路图)(任务书,开题报告,毕业论文14900字,cad图5张,电路图,录像,答辩PPT)
(单驱动)
摘 要
本设计运用Freescale S12单片机控制模型车自动沿着黑白赛道完成比赛。本设计主要包括智能车的组装、机械机构的调整、系统方案和控制策略的选定、硬件电路和软件控制的设计等几部分。
工作方式简介:用电感采集跑道信号,通过将电感信号滤波放大后,把信号传送到MC9S12XS128主芯片进行AD转换和处理,运用控制策略分辨出赛道的黑线和路况,控制转速和转向,使小车顺利完成比赛,在此基础上,再提高小车速度,对小车行驶路径进行优化。
关键词:智能车;MC9S12XS128;PID;路径优化
Smart Car Design Based on Electromagnetic
(The Single Drive)
Abstract
The design using Freescale S12 MCU to control model car run along the black and white track and complete the race Automatically.It includes smart car assembly, mechanical sector adjustment, system solutions and control strategy selected, hardware circuit and software control design and so on.
How it works:It use the inductance to capture the track image signal. It use amplifier circle to transform the analog signal of the image,then transmit it to MC9S12XS128 main chip for processing. Use control strategy to distinguish the track and the conditions,then control speed and steering to complete the race successfully. Base on this, then increase the speed of the car and do some track optimization.
Keywords: smart car; MC9S12XS128; PID; track optimization
整车设计思路
智能车的比赛是以最短时间完成比赛为目标,对机械、硬件和算法的要求都挺高,要求软硬件两方面都能兼顾,能够快速、稳定的完成比赛。
首先在硬件平台的搭建方面,我们在规定允许的范围内,对车模进行了适当的改装,在前后轮的定位、轮胎等进行了处理,使车模的稳定性更强,为速度的提高奠定了基础。同时,在电路设计上,添加了串口等功能,使传感器的调节更加方便,在试车时也会更加方便。
然后是软件平台的搭建,在软件平台上,我们设计了无线遥控,可以在试车时及时控制小车启动、停车,极大地方便了调车,能够更清楚得看清小车的行进路线,保证了程序调试时更加具有针对性。
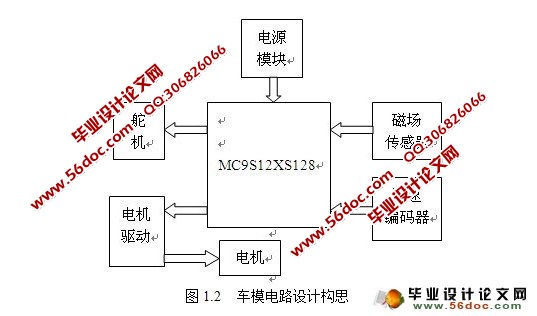
1.2.1 控制系统
智能车的工作模式如下图所示:电磁传感器获取赛道某点电磁特性,信号输入到 S12 控制核心,进行进一步处理以获得赛道信息;通过欧姆龙360线增量型编码器转速传感器检测车速,并采用 S12 的输入捕捉功能进行脉冲计数计算车速和路程;通过片上AD转换输入信号;舵机转向采用分段PD控制;电机转速控制采用 PID控制,通过 PWM控制驱动电路调整电机的功率。
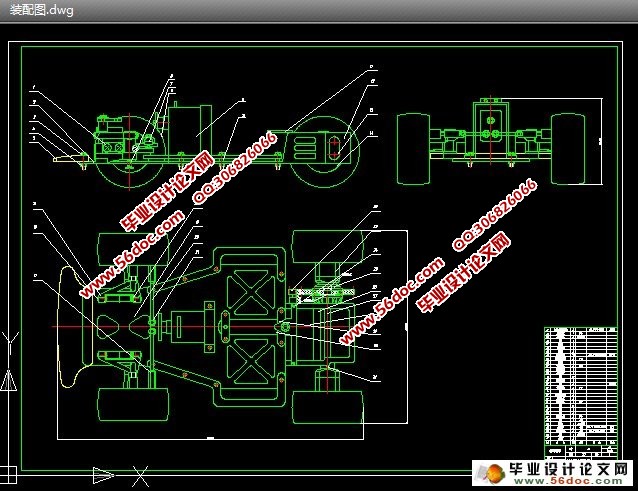
1.2.2 整车布局
鉴于赛车和赛道的特点,在整车布局上仍延续基本布局的思路,采用低重心紧凑型设计,并架高舵机以提高响应速度。为调整整车重心位置,采用碳杆支撑电磁传感器,减小转动惯量。 在降低整车重心方面采用了低位主板的布局,同时设计了强度高质量轻的电磁传感器安装架,减轻信号采集电路板重量,降低电池架高度,降低赛车前方底盘高度。
目录
1 引言 1
1.1 概述 1
1.2 整车设计思路 2
1.2.1 控制系统 2
1.2.3 电磁组赛道主要特点 4
2 硬件设计 6
2.1 传感器方案 6
2.1.1 磁场检测传感器 6
2.1.2 传感器的布局 7
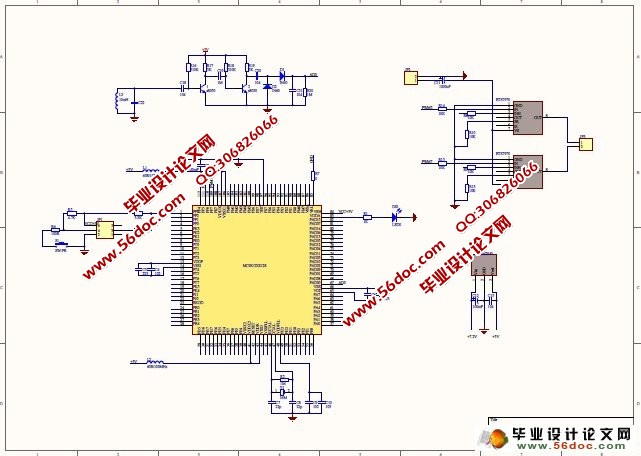
2.2 主板电路设计 7
2.2.1 电源模块 7
2.2.2 驱动模块 8
2.2.3 各模块接口 9
2.3 最小系统版 9
2.4 其它外设 14
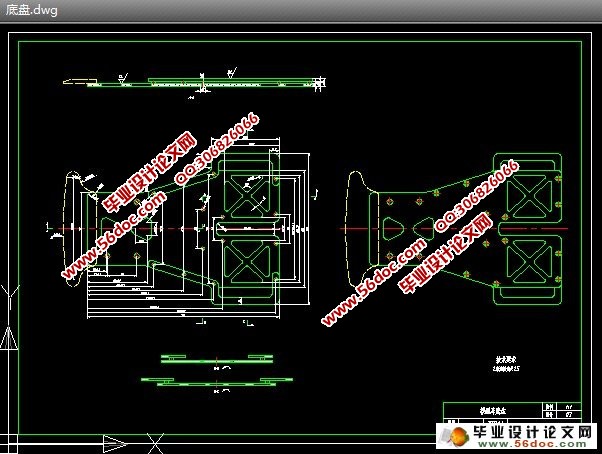
3 机械设计 15
3.1 舵机的安装 15
3.2 传感器的安装 15
3.3 车模的机械调校 15
3.3.1 底盘高度 15
3.3.2 前轮定位 15
3.3.3 差速调整 17
4 软件设计 18
4.1 程序整体设计 18
4.1.1 程序框图 18
4.1.2 系统初始化 18
4.2 磁场信息获取及处理 22
4.3 赛车定位 23
4.4 舵机控制 28
4.5控速策略 29
4.6 开发和调试手段 31
4.6.1 BDM调试器的使用 31
4.6.2 程序下载和调试 32
4.6.3 Matlab数据分析 33
4 赛车主要技术参数 34
5 结论 35
参考文献 36
致谢 37
附录A 程序源代码 38
附录B 设计图纸 46
|