智能寻迹小车系统设计(含电路图,程序)(课题申报表,任务书,开题报告,中期检查表,外文翻译,论文15400字,程序,答辩PPT)
摘 要
本论文是通过单片机对光、声信号处理从而实现寻迹小车智能系统设计,主要是通过把系统分成若干个模块实现的。
系统按照功能划分为:路径识别模块(通过外接红外传感器传入的信号实现)、直流电机驱动模块(通过超声波传感器传入的信号实现的)、舵机转向模块、速度测量模块、电源模块、单片机控制系统模块、运行调试模块等,接收到的反馈信号由单片机计算后发出指令调整运行。
最后通过STC-ISP软件把程序写入单片机,测试调试,达到了实验预期的结果即小车可沿着指定黑线循迹前进并有效蔽障。
关键词:循迹;智能蔽障;单片机;红外;超声波探测器
Abstract
This paper is a single-chip light, acoustic signal processing in order to achieve tracing the car intelligent system design, including system is divided into several modules to achieve.
System in accordance with the division of functions as follows: path identification module (through an external infrared sensor incoming signal), the DC motor driver module (by the ultrasonic sensor incoming signal), steering gear steering module, the speed measurement modules, power modules, microcontroll ercontrol system module, to run the debug module, and and so on on. Received feedback signal from the microcontroller calculated issued a directive to adjust the run.
Finally, the STC-ISP software program written to microcontroller, testing, debugging, to achieve the expected results of the experiment. Experiment is expected to reach the results that the car can be along the designated black line tracking forward and effectively unblinded.
key words:Tracking; smart unblinded; microcontroller; infrared, ultrasonic detectors
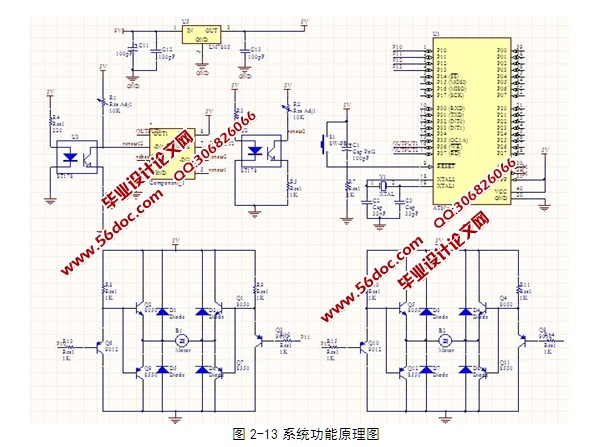
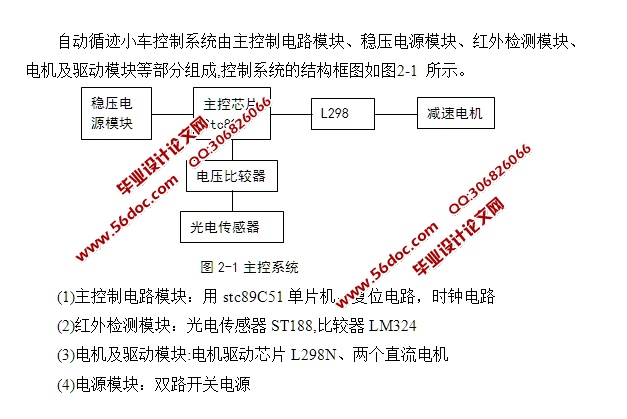
自动循迹小车控制系统由主控制电路模块、稳压电源模块、红外检测模块、电机及驱动模块等部分组成
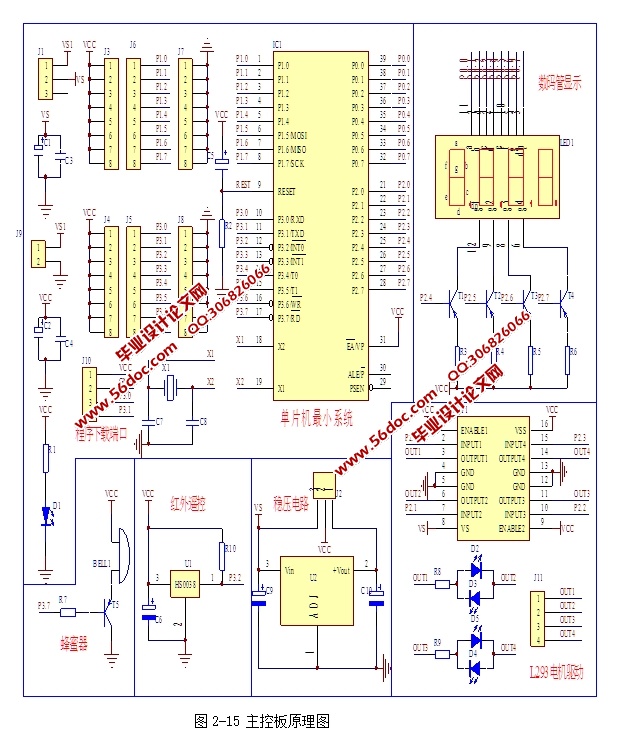
(1)主控制电路模块:用stc89C51单片机、复位电路,时钟电路
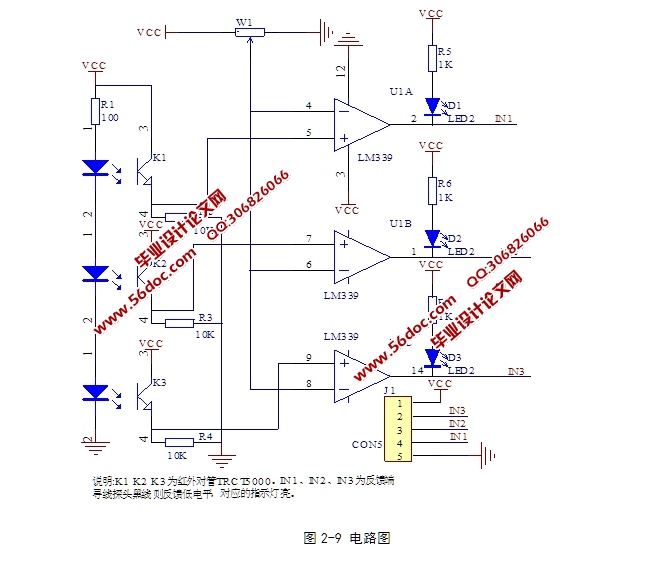
(2)红外检测模块:光电传感器ST188,比较器LM324
(3)电机及驱动模块:电机驱动芯片L298N、两个直流电机
(4)电源模块:双路开关电源
目 录
第1章 绪论 1
1.1使用和发展历史 1
1.2课题研究的目的和意义 3
第2章智能循迹小车模块设计 5
2.1系统构架 5
2.2路径识别模块 5
2.3直流电机驱动模块 10
2.4舵机转向模块 11
2.5速度测量与蔽障模块 12
2.6电源控制模块 13
2.7单片机控制系统模块 14
2.8主控板原理图 16
第3章 软件及程序设计思路 17
3.1软件调试平台 17
3.2驱动动力程序设计 17
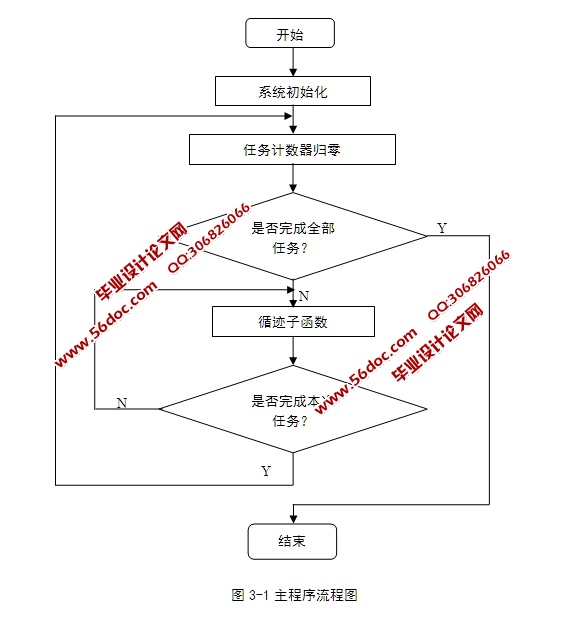
3.3总体软件流程 18
3.4循迹流程设计 19
3.5 避障流程设计 22
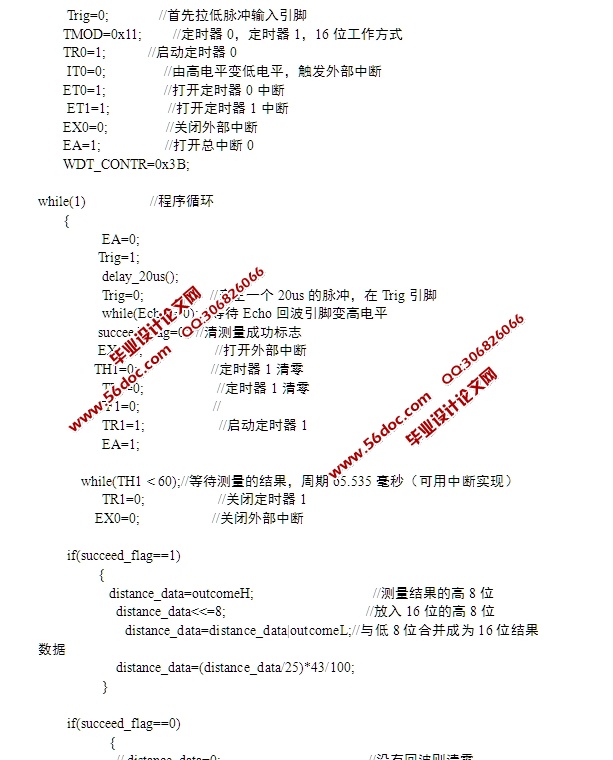
3.6测距子程序流程图 23
第4章 制作安装与调试 25
4.1安装步骤 25
4.2测试场景介绍实际测试结果 25
4.3小车的调试 26
4.4电机PWM控制的调试过程 26
结 论 28
参考文献 29
致 谢 31
附 录 32
|