基于单片机的飞行小黄人控制器及姿态算法研究(附电路图,程序代码)(任务书,开题报告,论文14000字,电路图,程序代码)
摘要
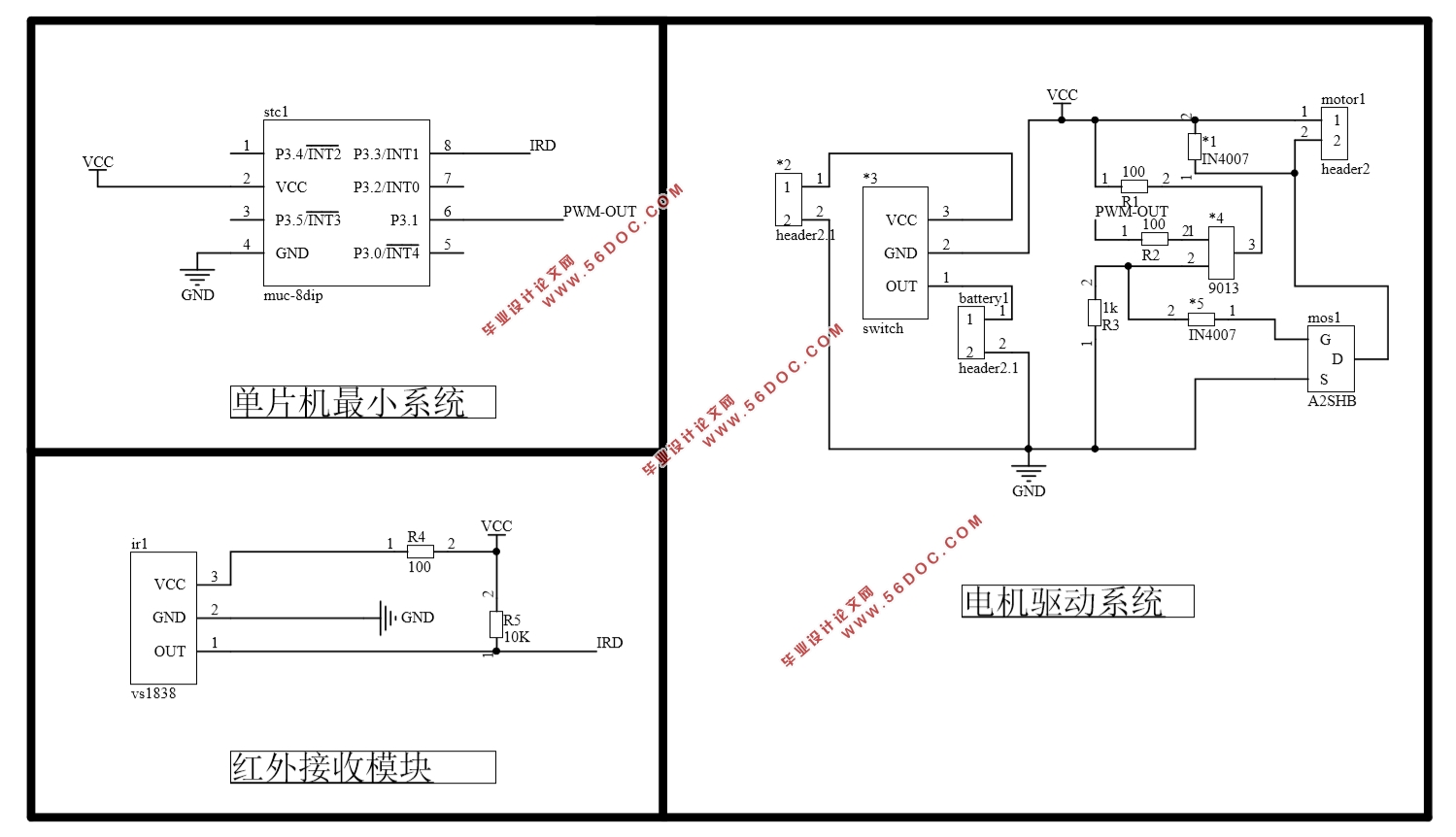
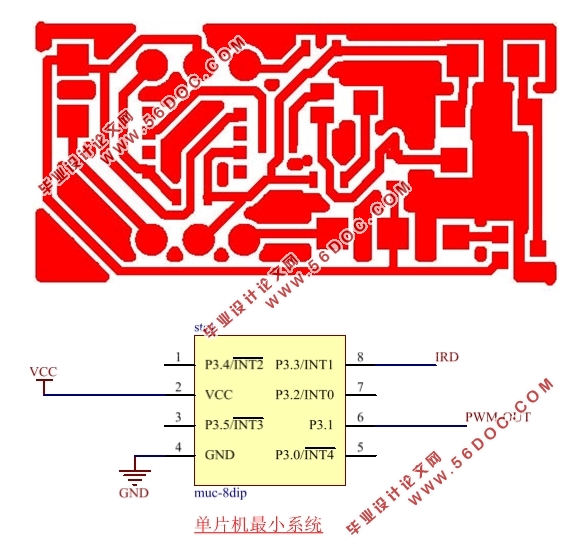
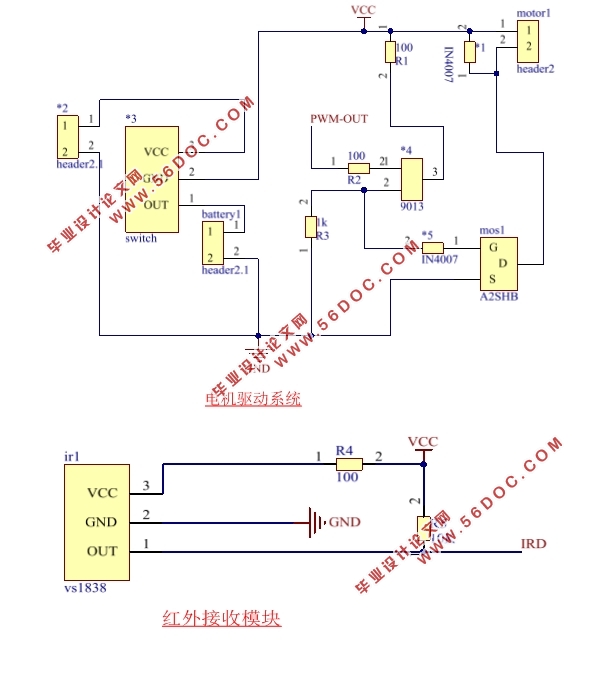
本文首先分析了飞行器在国内外的现状,其次针对了单片机STC89C52与STC15W104的优缺点进行了详细的分析,分析了三种电机驱动方式的优缺点,详细讲解了不同驱动方式对于整个系统电路的影响,硬件电路设计部分包括单片机最小系统、电机驱动电路、红外接收电路。软件的设计包括核心单片机STC15W104对红外信号的处理,单片机的输出PWM波驱动电机转动。同时详细介绍了新型单片机STC15W104寄存器不同位的功能及特点,对于以后使用新型单片机STC15W104具有重要的指导意义。
论文主要研究了姿态算法的解析,分析了欧拉角和四元数对于飞行器旋转姿态分析的优缺点,分析了四元数方法如何解析飞行器的姿态问题,对于以后研究飞行器甚至无人机具有指导作用。
本文使用多个方案综合比较优缺点选择性价比最高的方案进行设计。并通过引用公式,辅以少量的计算,最终使得小黄人飞行器在红外遥控器的控制下能顺利起飞和停止,顺利完成毕业设计。
关键词:STC89C52;STC15W104;欧拉角;四元数
Abstract
This paper first analyzes the status quo of the aircraft at home and abroad, analyzes the advantages and disadvantages of STC89C52 and STC15W104 single chip microcomputer, analyzes the advantages and disadvantages of the three motor drive modes, explains in detail the influence of different driving modes on the whole system circuit, hardware circuit design Part of the microcontroller, including the smallest system, the motor drive circuit, infrared receiver circuit. Software design includes the core microcontroller STC15W104 on the infrared signal processing, single-chip output PWM wave drive motor rotation. At the same time, the function and characteristics of different bits of STC15W104 register are introduced in detail, which is of great significance for the future use of STC15W104.
The paper analyzes the advantages and disadvantages of the Euler angle and the quaternion for the analysis of the attitude analysis of the aircraft. It analyzes how the quaternion method analyzes the attitude problem of the aircraft, and guides the aircraft and even the unmanned aerial vehicle effect.
In this paper, the use of multiple programs to compare the advantages and disadvantages of the most cost-effective option to design. And by reference to the formula, supplemented by a small amount of calculation, and ultimately make the small yellow aircraft in the infrared remote control under the control of the smooth take off and stop, successfully completed the graduation design.
Key words: STC89C52; STC15W104; Euler angle; quaternion
目录
第1章绪论 1
1.1 引言 1
1.2 本文研究背景及意义 1
1.3 国内外研究现状 1
第2章方案论证 3
2.1电机驱动方案论证 3
2.2红外接收方案论证 5
2.3本章小结 6
第3章硬件电路设计 7
3.1 硬件需求分析 7
3.2 系统整体框图 7
3.3 单片机模块 7
3.4蓄电池模块 9
3.5电机模块 10
3.6红外发射模块-遥控器 10
3.7电路图设计 11
3.7.1 单片机最小系统模块 11
3.7.2 红外接收模块 12
3.7.3 电机驱动模块 12
3.8本章小结 12
第4章软件程序设计 14
4.1 软件需求分析 14
4.2 程序流程设计 14
4.2.1 单片机程序流程 14
4.2.2 红外接收程序流程 15
4.3 程序编写 16
4.3.1 需要配置的寄存器 16
4.3.2 寄存器的设置 18
4.4 本章小结 19
第5章姿态算法的研究 21
5.1 四元数 21
5.1.1四元数的基本性质 21
5.1.2 四元数与欧拉角的转化 22
5.2 欧拉角 23
5.3 欧拉角四元数对比 23
5.4 本章小结 24
第6章系统测试 25
6.1 测试设备 25
6.2 安装调试 25
6.3 测试结果 25
6.4 本章小结 25
第7章总结与展望 27
参考文献 28
附录A 30
致谢 30
|