喂饭机器人控制系统设计(任务书,开题报告,外文翻译,论文说明书13000字,程序代码,电路原理图)
摘要
摘要:机械手技术应用于各类工业产业,随着机械手技术的发展和人们物质生活的需要,机械手不再限于工业方面的应用,而是开始深入人们的生活当中。本文主要叙述了应用于生活服务方面的喂饭机器人机械手的控制系统设计过程,介绍了机械手的控制系统的设计方法及理论。
机械手设及多个科学领域,例如机械设计技术、自动控制技术、计算机技术、电子学、传感器等。本设计以AT89S51单片机为核心,超声波传感器进行位形测定并反馈给单片机,单片机相应产生PWM波达到控制R/C伺服电机的启停、方向及角位移,完成喂饭机器人的使用需求和控制需求。
关键词:机械手;AT89S51单片机;PWM技术;机电控制;自动化
Abstract
Abstract: Manipulator technology is applied to various industrial industries. With the development of manipulator technology and the needs of people's material life, robots are no longer limited to industrial applications, but begin to penetrate people's lives. This paper mainly describes the design process of the control system of the feeding robot manipulator applied to the life service, and introduces the design method and theory of the control system of the manipulator.
The robot is designed in a number of scientific fields, such as mechanical design technology, automatic control technology, computer technology, electronics, and sensors. The design takes the AT89S51 single-chip microcomputer as the core, the ultrasonic sensor performs the shape measurement and feeds back to the single-chip microcomputer, and the single-chip microcomputer generates the PWM wave to control the start-stop, direction and angular displacement of the R/C servo motor, and completes the use requirements and control requirements of the feeding robot. .
Keywords: robot; AT89S51 single chip microcomputer; PWM technology; electromechanical control; automation
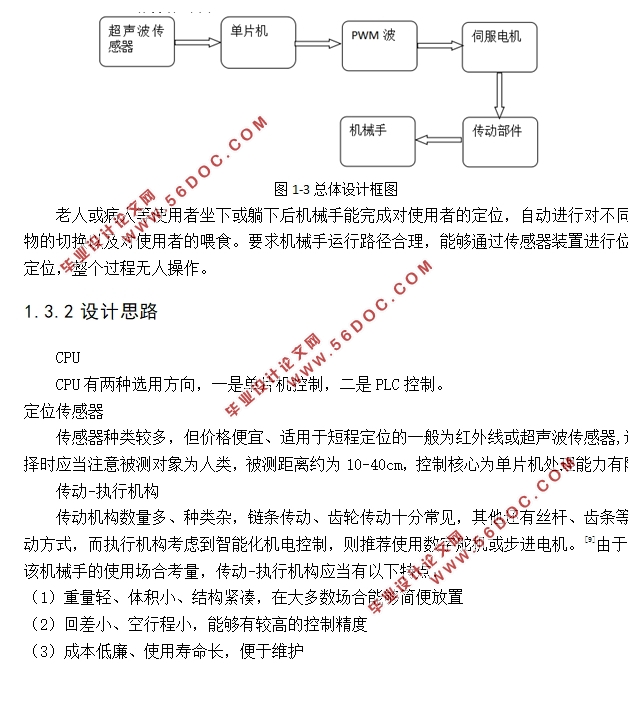
本次设计主要分为三个方面:机械手控制系统、视觉识别系统和机械手结构设计。我所负责的是控制系统设计,主要应用了c51单片机、超声波测距传感器、R/C伺服电机和PWM波技术,即以超声波传感器测距并向单片机反馈,然后单片机产生PWM波控制伺服电机完成机械手传动、控制。
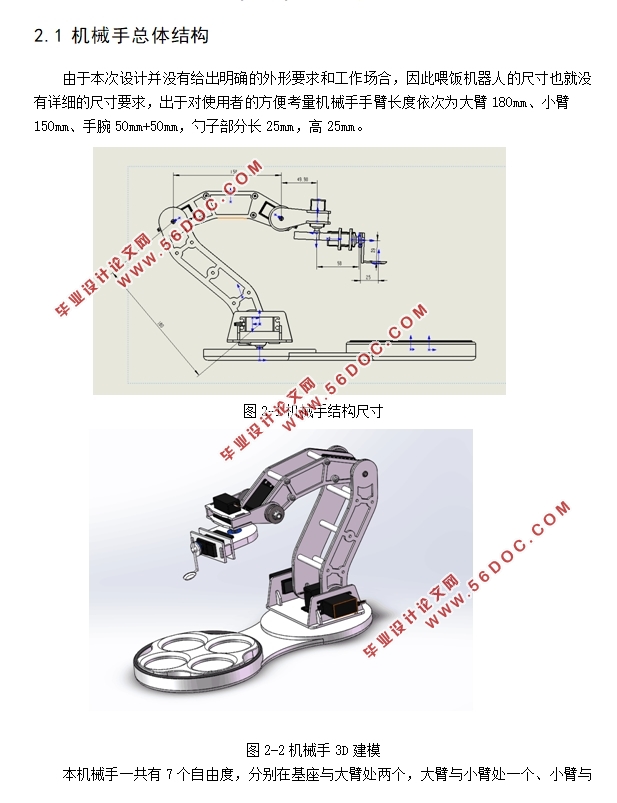
机械手总体结构
由于本次设计并没有给出明确的外形要求和工作场合,因此喂饭机器人的尺寸也就没有详细的尺寸要求,出于对使用者的方便考量机械手手臂长度依次为大臂180mm、小臂150mm、手腕50mm+50mm,勺子部分长25mm,高25mm。

目录
第一章 绪论 1
1.1 概述 1
1.2 国内研究外现状 2
1.3 总体设计方案 3
1.3.1 设计要求 3
1.3.2 设计思路 3
第二章 硬件设计 5
2.1 机械手总体结构 5
2.2 cpu 6
2.2.1 cpu选型 6
2.2.2 AT89S51单片机 6
2.3 传动-执行机构 8
2.3.1电机选型 8
2.3.2 舵机 10
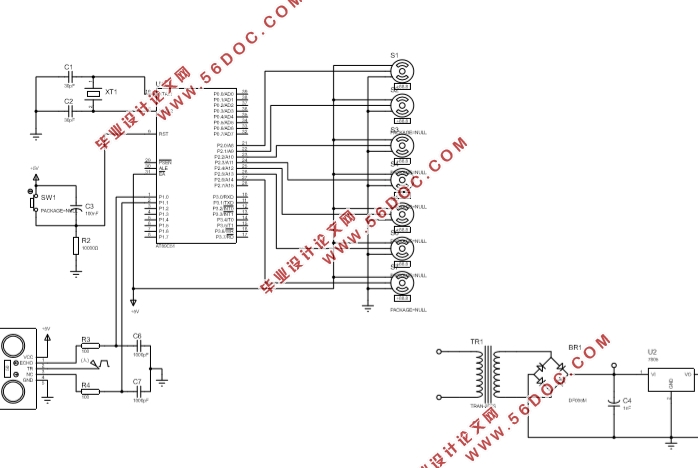
2.4 总体电路 12
2.5 单片机电路 12
2.5.1 晶振电路 12
2.5.2 看门狗定时器 13
2.6 7805稳压电路 13
2.7 超声波测距模块 14
2.7.1 选型 14
2.7.2 超声波测距模块电路 16
第三章 程序编辑 17
3.1汇编语言 17
3.2 Keil μVision5 17
3.3 主程序 17
3.4 子程序 18
3.4.1 延时子程序 18
3.4.2 中断子程序 19
3.4.3测距子程序 19
第四章 仿真模拟 21
4.1 Proteus 21
4.2 仿真过程 21
结论 23
参考文献 24
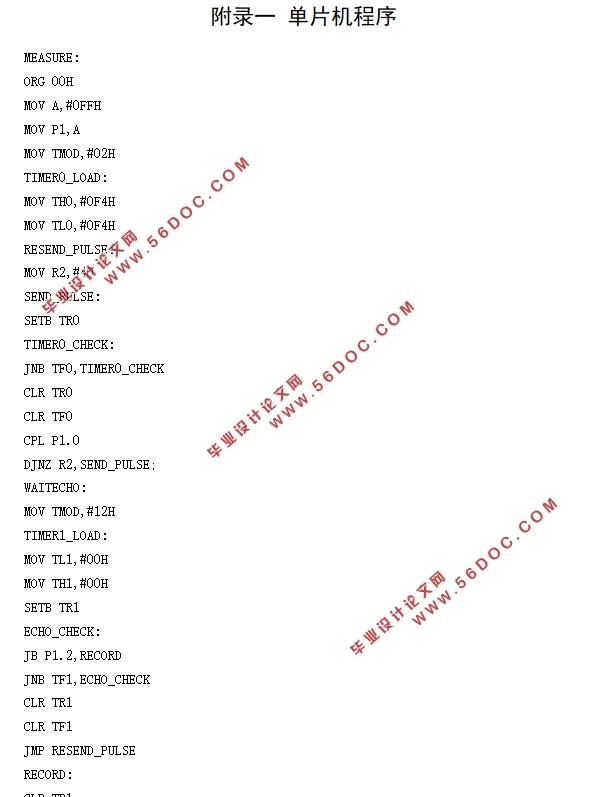
附录一 单片机程序 25
附录二 电路原理图 32
致谢 33
|