基于单片机的蓝牙避障小车的设计(附程序代码,电路原理图)
来源:56doc.com 资料编号:5D21480 资料等级:★★★★★ %E8%B5%84%E6%96%99%E7%BC%96%E5%8F%B7%EF%BC%9A5D21480
资料以网页介绍的为准,下载后不会有水印.资料仅供学习参考之用. 密 保 惠 帮助
资料介绍
基于单片机的蓝牙避障小车的设计(附程序代码,电路原理图)(任务书,开题报告,外文翻译,论文13000字)
摘 要
本设计使用STC89C52单片机作为小车的主控制核心,以车轮机械结构作为小车底层系统,通过软件编程控制硬件设计,达到实现蓝牙无线遥控,超声波自动避障的目的。手机软件APP连接蓝牙模块,能够控制小车的向前、向后、向左、向右行动的目的;小车前部分装有超声波模块,能够实时的测量小车前方的实时数据,判断是否有障碍物,从而采取不同的电机控制策略,通过这种方法,构建了一种能够通过蓝牙遥控和超声波自动避障功能的机器平台。
此平台对于家庭扫地机器人,无人汽车,仓储货运机器人等方面都有一定的参考价值,进一步完善之后可以大大提高人们的生活水平,提高工业生产效率。
关键词:智能小车 单片机 超声波壁障 蓝牙
Design and implementation of Bluetooth obstacle avoidance car based on MCU
Abstract
This design uses STC89C52 microcontroller as the main control of the car core, which takes the wheel mechanical structure as the car bottom system and controls hardware design through the software programming, then we will achieve the purpose of Bluetooth wireless remote control and ultrasonic automatic obstacle avoidance. Mobile phone APP can control the car forward, backward, turn left, turn right by connecting Bluetooth module; The front part of the car has an ultrasonic module, which can measure real-time data and judge whether there are obstacles and adopt different motor control strategy. We can built a machine platform through the Bluetooth remote control and ultrasonic automatic obstacle avoidance function in this method.
This platform has a certain reference value for the family of sweeping robots, unmanned vehicles, storage and transportation robots, etc. It can improve the people's living standards and efficiency of industrial production greatly.
Key Words: Intelligent car; single chip microcomputer; ultrasonic barrier
目 录
摘 要 I
Abstract II
目 录 1
第一章 引言 3
1.1 选题背景及意义 3
1.2 智能小车的发展历程 3
1.3 课题任务 4
第二章 总体设计方案 5
第三章 系统硬件方案的设计与实现 7
3.1 MCU控制模块 7
3.1.1 STC89C52单片机介绍 7
3.1.2 单片机电路实现 9
3.2 无线模块 11
3.2.1 方案的选择 11
3.2.2 无线模块简介 12
3.2.3 设计实现 12
3.3 测距模块 13
3.3.1 方案的选择 13
3.3.2 测距模块简介 13
3.3.3 设计实现 14
3.4 电机驱动模块 15
3.4.1 电机驱动简介 15
3.4.2 设计实现 15
3.5 报警模块 16
3.5.1 蜂鸣器简介 16
3.5.2 设计实现 16
3.6 电源模块 17
第四章 系统软件方案的设计 18
4.1编译软件的介绍 18
4.2总体方案流程 18
4.3软件的程序实现 20
4.3.1 超声波测距程序设计 20
4.3.2 电机驱动程序设计 21
4.3.3 蓝牙控制程序设计 23
4.3.4 手机蓝牙app的设计 25
4.3.5 蜂鸣器程序设计 26
4.3.6 延时程序设计 28
第五章 设计的整体调试 29
5.1 硬件电路绘制 29
5.1.1 硬件电路绘制软件介绍 29
5.1.2 整体电路的设计 29
5.2 系统调试 29
5.2.1 软件调试 29
5.2.2 硬件调试 29
5.3 功能测试 30
结束语 33
参考文献 34
致谢 36
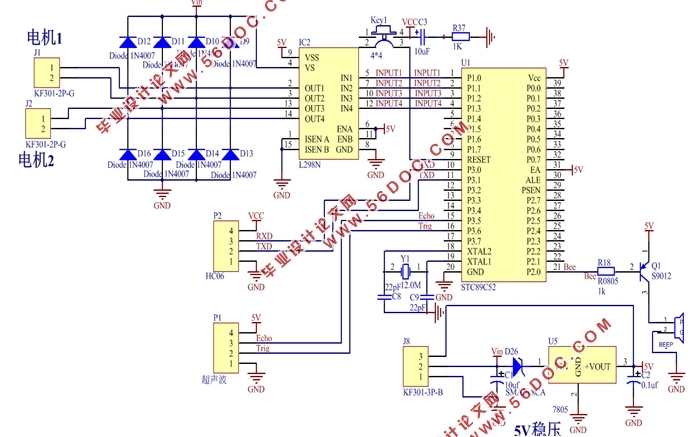
附录1 整体电路原理图 37
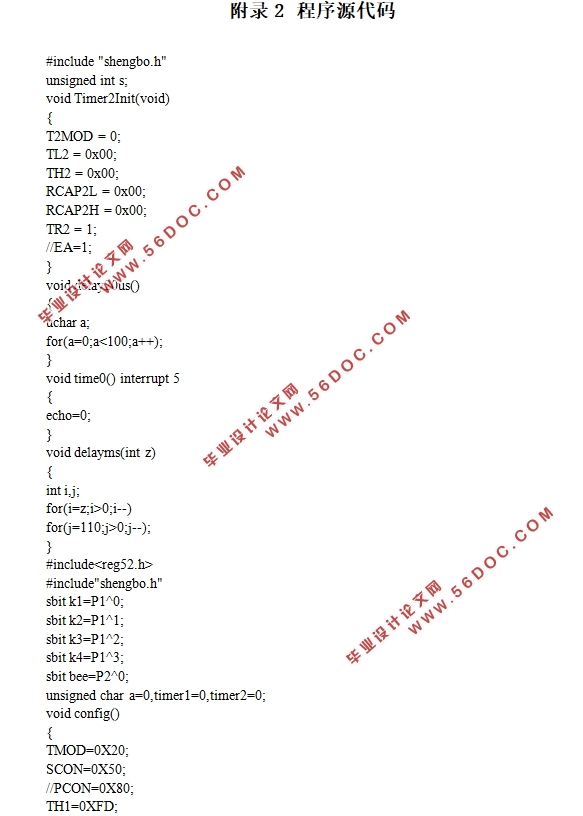
附录2 程序源代码 38
|
