单车智能泊车机器人控制系统设计(附电路图,仿真,程序)(任务书,开题报告,论文22000字,电路图,keil,proteus仿真)
摘要
时下兴起的“共享单车”热潮带来了自行车乱摆放导致道路拥堵的现象,本文针对解决该问题的单车智能泊车机器人的控制系统进行设计,以满足机器人在实现各项功能需求的控制要求。
本文首先分析了单车智能泊车机器人的需要具备的功能,以此为基础进行了控制方案思路的总体设计。随后展开了硬件电路的设计,其中采用AT89C52单片机作为主控芯片,并包含采用可编程并行I/O口8255A和锁存器74HC164扩展I0的IO扩展模块,直流电机驱动电路模块、步进电机执行机构模块、LCD1602显示模块、HC-SR04超声波模块、红外光电传感电路模块、电源模块、接口模块、视觉传感器A/D转换模块等其它一些实现功能需求的外围电路模块。
单车智能泊车机器人采用寻迹方式进行导航,为此在移动的过程中运动控制极为重要。通过研究PID控制算法,将其应用于电机PWM调速中。通过建立电机的数学模型,整定参数,确定了PID的各个参数,并通过simulink仿真验证同时应用于后续的控制程序开发中。
最后,本课题完成了单车智能泊车机器人控制程序的开发。通过实际工作的流程设计程序算法,实现PWM调速、红外光电传感器寻迹、超声波接受发送、LCD显示当前状态、机器人抓取等功能。通过仿真验证了单车智能泊车智能机器人的控制系统能够满足机器人自动停放自行车的要求。
关键词:PWM调速;PID控制;多传感器;控制系统;
Abstract
The upsurge of "sharing single car" has brought about the phenomenon of road congestion caused by the cycling of bicycles. This paper designs the control system of the single car intelligent parking robot to solve this problem, in order to meet the control requirements of the robot in realizing various functional requirements.
Functions of the intelligent vehicle parking robot are analyzed in this paper firstly, then the overall design of the control scheme is designed. Then the hardware circuit is designed, in which the AT89C52 MCU is used as the main control chip.It also has an IO extension module, which adopts the programmable parallel I/O port 8255A and the latch 74HC164 to extend I0, a DC motor drive circuit module, a step motor actuator module, a LCD1602 display module, a HC-SR04 ultrasonic module, a infrared light module andother circuit modules, such as electric sensing circuit module, power module, interface module, visual sensor A/D conversion module, and other peripheral circuit modules to achieve functional requirements.
The single car intelligent parking robot uses the tracing method to navigate, so motion control is very important in the process of mobile. By studying the PID control algorithm, it is applied to PWM speed regulation of motor. By setting up the mathematical model of the motor and setting the parameters, the parameters of the PID are determined, and the Simulink simulation verification is applied to the subsequent development of the control program.
Finally, we have completed the development of the control program for single car intelligent parking robot. Through the process design algorithm of actual work, the functions of PWM speed regulation, infrared photoelectric sensor trace, ultrasonic receiving and sending, current state of LCD display, robot grasping and so on are realized.The simulation proves that the control system of intelligent vehicle parking robot can meet the requirements of robot parking automatically.
Keywords: PWM speed control; PID control; multi sensor; control system
目录
第1章 绪论 1
1.1 国内外发展现状 1
1.2 轮式移动机器人关键技术 1
1.2.1 优化结构设计 2
1.2.2 多传感器信息融合 2
1.2.3 导航与定位技术 2
1.2.4路径规划 3
1.3 课题研究目的与意义 3
1.4 课题研究主要内容 3
第2章 单车智能泊车机器人控制系统方案设计 5
2.1功能需求分析及实现思路 5
2.2主控芯片选型 5
2.3传感器选型 6
2.3.1 红外光电传感器 6
2.3.2 超声波传感器 7
2.3.3 视觉传感器 7
2.3.4 编码器 8
第3章 单车智能泊车机器人控制系统硬件电路设计 9
3.1 MCU及IO口扩展电路 9
3.1.1 8255A扩展 9
3.1.2 74HC164扩展 9
3.1.3 MCU及扩展电路 10
3.2 驱动电路设计 10
3.2.1 电机选型 10
3.3.2 驱动器选型 12
3.3.3 驱动电路 13
3.3传感器电路设计 13
3.3.1红外光电传感器电路 13
3.3.2图像传感器电路 14
3.4 电源及其他外围电路设计 15
3.4.1电源电路设计 15
3.4.2其他外围电路设计 15
3.5 通信模块设计 16
3.5.1蓝牙模块 16
3.5.2预留通信接口 17
第4章 单车智能泊车机器人运动控制算法研究 19
4.1 PID运动控制算法 19
4.2 位置式和增量式PID算法 19
4.3 建模与仿真 20
4.4 PID参数整定 22
4.4.1动态特性参数法整定PID参数——基于Z-N整定公式 22
4.4.2衰减比例法整定PID参数 24
4.4.3试凑法整定PID参数 24
第5章 单车智能泊车机器人控制系统软件设计 26
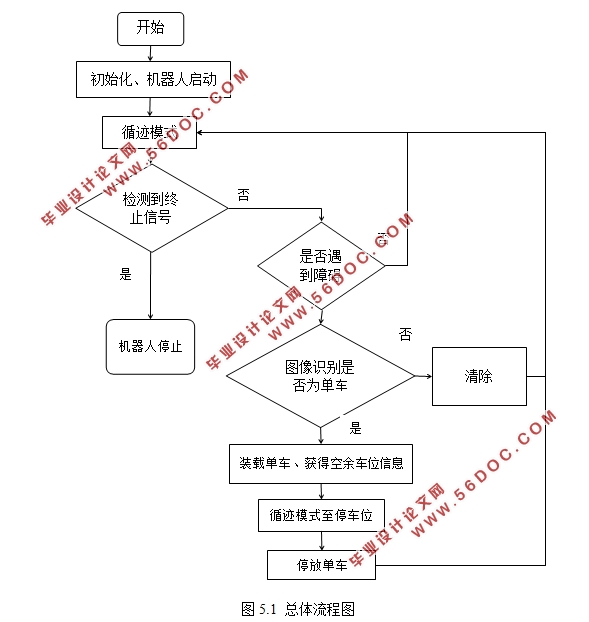
5.1 控制系统软件总体方案设计 26
5.2 主程序 27
5.2.1 等待接受命令循环 27
5.2.2 初始化设置过程 28
5.2.3 寻迹过程循环 29
5.3 任务子程序 31
5.3.1 PWM调速程序 31
5.3.1超声波发送接收程序 32
5.3.3 LCD1602显示子程序 32
5.3.4 PID算法实现程序 33
5.3.5 抓取程序 33
5.4 中断服务程序 34
5.5仿真与调试 35
5.1 PWM调速 35
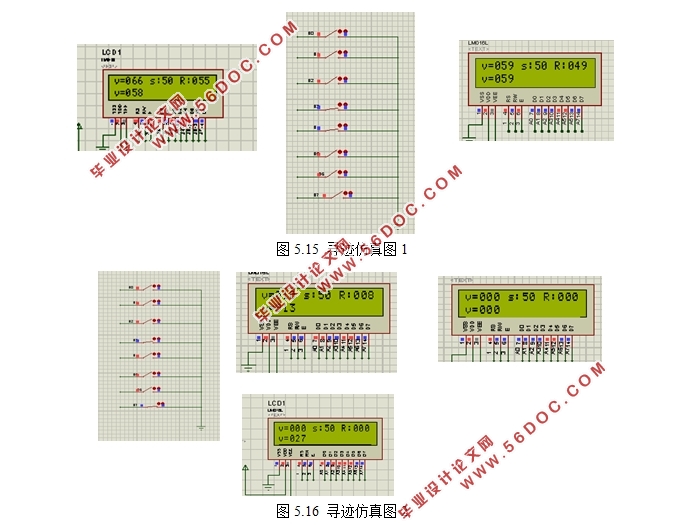
5.5.2显示 36
5.5.3 PID算法仿真 37
5.5.4寻迹程序仿真 37
第6章 总结 39
参考文献 40
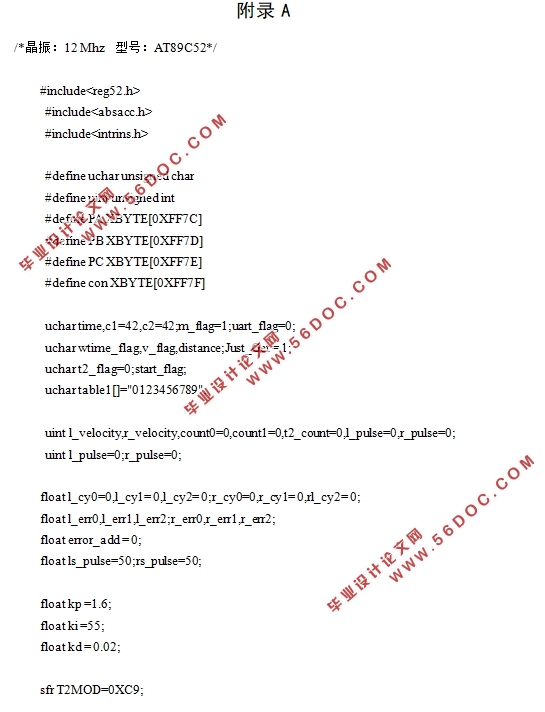
附录A 44
致谢 65
|
