基于单片机的模块化循迹小车的设计
来源:56doc.com 资料编号:5D25728 资料等级:★★★★★ %E8%B5%84%E6%96%99%E7%BC%96%E5%8F%B7%EF%BC%9A5D25728
资料以网页介绍的为准,下载后不会有水印.资料仅供学习参考之用. 密 保 惠 帮助
资料介绍
基于单片机的模块化循迹小车的设计(论文13000字)
摘 要
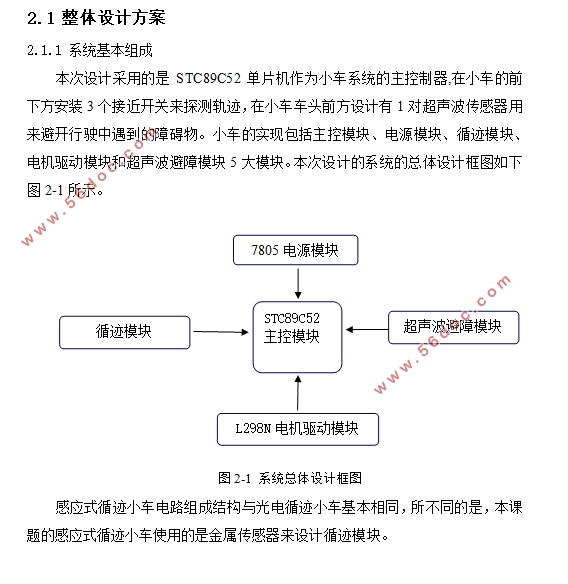
智能作为现代的新发明,是以后的发展方向,它可以按照预先设定的模式在一个环境里自动的运作,不需要人为的管理,可应用于科学勘探等等的用途。本次设计的智能循迹小车就是其中的一个体现,以STC89C52单片机作为微控制器,设计出一种全自动智能循迹小车,通过金属传感器获取道路的信息,来对小车的方向和速度进行控制。其中小车驱动由L298N驱动电路完成。使得小车能够自主识别铺设好的铝箔轨迹并根据轨迹走向实现快速稳定的循迹行驶。本次设计采用电感元件做传感器,实现感应循迹,从根本上避免了光线的干扰,且设计实现模块化,调试方便,循迹轨迹可以隐蔽在赛道下方等诸多特点大大拓宽了小车的活动空间。
关键词:STC89C52 循迹小车 感应式 传感器 铝箔 避障
Based on single chip microcomputer of modular tracking car
Abstract
The smart as a new modern invention, is the future development direction, it can operate automatically at preset mode, without human management. It can be applied to the use of scientific exploration and so on.The design of the Intelligent tracking car is one of them .It uses STC89C52 as the controller.The design car is an automatic intelligent tracking car.It gets information by way of a metal sensor,thus controls the direction and speed of the car.Among them, the car driver uses L298N.So that the car can autonomously recognizes paved track foil and according to the track to achieve fast and stable tracking travel.The design uses an inductive element as sensors to achieve sensor tracking. It avoids the interference of light from a fundamental and modular design.The design is easy to debug, tracking the trajectory of the track may be hidden beneath, and this greatly broadens the car’s activity space.
Key words: STC89C52;Tracking car;Inductive sensor Foil;Tracking avoidance
目录
摘 要 I
Abstract II
第一章 引言 1
1.1 智能循迹小车概述 1
1.2 国内外研究动态 1
1.3 课题研究背景 1
1.4 本设计完成的工作 2
第二章 总体方案设计 3
2.1 整体设计方案 3
2.1.1 系统基本组成 3
2.1.2 系统设计步骤 3
2.2 各部分设计方案 4
2.2.1 车体设计 4
2.2.2 主控模块 4
2.2.3 电源模块 5
2.2.4 循迹模块 5
2.2.5 电机驱动模块 5
2.2.6 超声波避障模块 6
第三章 硬件设计 7
3.1 小车总体设计 7
3.2 主控模块 8
3.2.1 时钟电路 8
3.2.2 复位电路 9
3.3 电源模块 10
3.4 循迹模块 11
3.5 电机驱动模块 12
3.5.1 L298N引脚结构 12
3.5.2 电机驱动原理 14
3.5.3 小车运动逻辑 15
3.6 超声波避障模块 16
3.6.1 超声波集成模块 17
3.6.2 声音报警电路 18
3.6.3 显示电路 19
第四章 软件设计 20
4.1 软件设计说明 20
4.2 软件设计流程 20
4.3 循迹模块 21
4.4 电机驱动模块 22
4.5 超声波壁障模块 22
第五章 安装调试与总结 24
5.1 硬件电路的制作与安装 24
5.1.1主控模块 24
5.1.2 电源电路 24
5.1.3循迹模块 25
5.1.4电机驱动电路 26
5.1.5超声波避障模块 27
5.2硬件测试 28
5.2.1 测试步骤 28
5.2.2 主控模块 28
5.2.3 循迹模块 28
5.2.3 超声波避障模块 28
5.3 软件测试 28
5.4 设计总结 30
参考文献 31
致谢 33
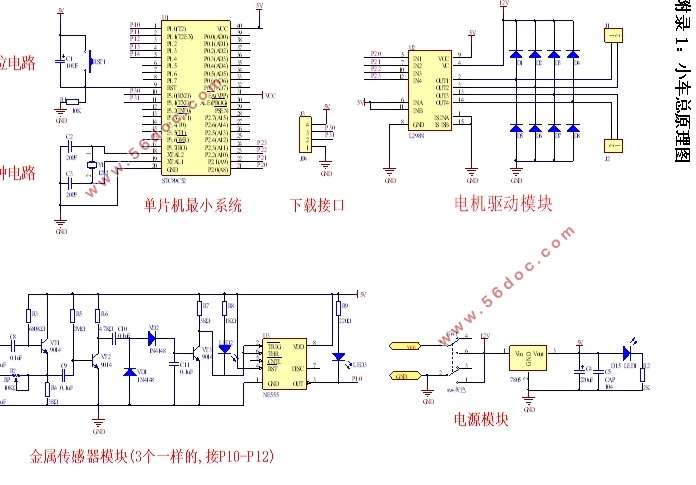
附录1:小车总原理图 34
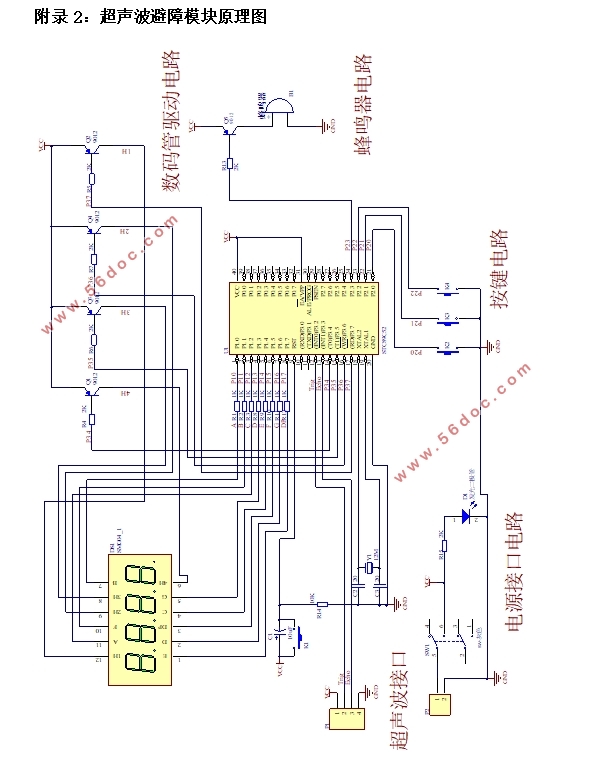
附录2:超声波避障模块原理图 35
附录3:小车整车实物图 36
|
