ЛљгкЕЅЦЌЛњЕФжЧФмаЁГЕЩшМЦ
РДдДЃК56doc.com зЪСЯБрКХЃК5D27064 зЪСЯЕШМЖЃКЁяЁяЁяЁяЁя %E8%B5%84%E6%96%99%E7%BC%96%E5%8F%B7%EF%BC%9A5D27064
зЪСЯвдЭјвГНщЩмЕФЮЊзМ,ЯТдиКѓВЛЛсгаЫЎгЁ.зЪСЯНіЙЉбЇЯАВЮПМжЎгУ. Ум БЃ Лн Аяжњ
зЪСЯНщЩм
ЛљгкЕЅЦЌЛњЕФжЧФмаЁГЕЩшМЦ(ТлЮФ10000зж)
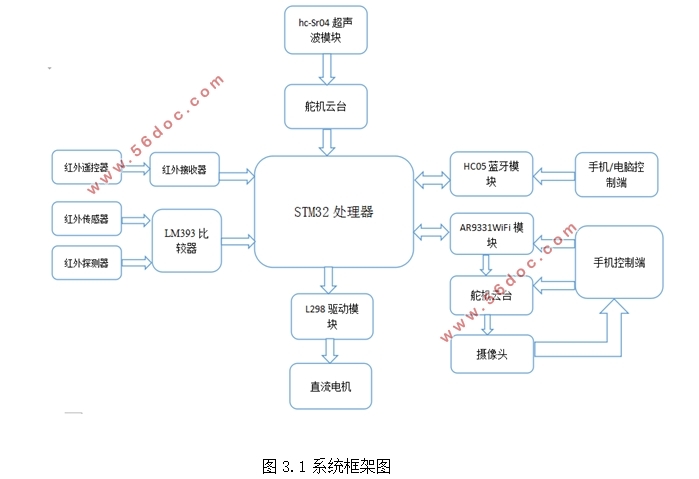
еЊвЊЃКБОДЮЩшМЦАќКЌСЫSTM32ПижЦЦїЁЂЕчЛњЧ§ЖЏЕчТЗЁЂКьЭтЬНВтЕчТЗЁЂКьЭтБмеЯЕчТЗЁЂГЌЩљВЈБмеЯЕчТЗЁЂРЖбРПижЦФЃПщЁЂwifiПижЦФЃПщЕШЖрИіФЃПщЃЌВЂвдstm32ЮЊКЫаФДІРэЦїЕФжЧФмаЁГЕЦНЬЈЩшМЦЁЃStm32зїЮЊДЫДЮЩшМЦЕФКЫаФДІРэЦїЃЌЭЈЙ§ЫќвдPWMЕїЫйММЪѕЖдЕчЛњЧ§ЖЏПижЦЁЃРћгУДЋИаЦїЪЖБ№КкАзЯпЁЃВЩгУКьЭтКЭГЌЩљВЈСНжжБмеЯЗНЪННјааБмеЯЃЌЭЌЪБдкДЫЛљДЁЩЯПЊЗЂЦфЫќЭиеЙЙІФмЁЃ
ЙиМќДЪЃКstm32;КьЭтЬНВт;PWM;ЕчЛњПижЦ
Intelligent car based on single chip microcomputer
AbstractЃКThe design includes STM32 Controller, motor drive circuit, infrared detection circuit, infrared obstacle avoidance circuit, ultrasonic obstacle avoidance circuit, Bluetooth control module, WiFi control module and many other modules, and STM32 as the core processor of Intelligent trolley platform design. Stm32 as the core of the design of the processor, through it to the PWM speed control technology to drive the motor. Use sensors to identify black and white lines. The use of infrared and ultrasonic obstacle avoidance methods to avoid obstacles, and on this basis to develop other expansion functions.
Key words:Stm 32; Infrared detection; Pwm; Motor control
ФП ТМ
1 аїТл 5
1.2баОПИХПі 5
2 ЯЕЭГЗНАИЩшМЦ 5
3 гВМўЩшМЦ 6
3.2 жабыДІРэФЃПщ 7
3.2.1 stm32зюаЁЯЕЭГЕчТЗ 7
3.2.2 stm32ЖЈЪБ/МЦЪ§Цї 8
3.3ЕчдДФЃПщЩшМЦ 9
3.4 ЕчЛњЧ§ЖЏФЃПщ 9
3.4.1 Ч§ЖЏФЃПщНсЙЙМАЦфдРэ 9
3.5.1 КьЭтДЋИаЦї 12
3.5.2ГЌЩљВЈБмеЯФЃПщ 13
3.6бМЃФЃПщЩшМЦ 16
3.6.1 бМЃФЃПщНсЙЙМАЦфдРэ 16
3.6.2 бМЃФЃПщЕчТЗЩшМЦ 18
3.7КьЭтвЃПиФЃПщЩшМЦ 18
3.8 РЖбРПижЦЩшМЦ 20
3.9 wifiЪгЦЕПижЦ 23
3.9.1 WiFiФЃПщЩшМЦ 23
3.9.2ЕчдДЕчТЗЩшМЦ 24
3.9.3 ЖцЛњдЦЬЈЕФЩшМЦ 25
4 ШэМўЩшМЦ 27
4.1 ГЬађЗТец 27
4.2 ГЬађЯТди 27
4.3бМЃЃЌКьЭтБмеЯКЭКьЭтвЃПиШэМўЩшМЦ 28
4.3.1жїГЬађПђЭМ 28
4.3.2жїГЬађ 29
4.3.3 бМЃзгГЬађ 31
4.3.4 БмеЯзгГЬађ 32
4.3.5 вЃПизгГЬађ 32
4.4ГЌЩљВЈБмеЯШэМўЩшМЦ 33
4.4.1 ГЬађПђЭМ 33
4.4.2 ГЌЩљВЈБмеЯжїГЬађ 33
4.5 РЖбРвЃПиШэМўЩшМЦ 36
4.5.1 жїГЬађ 36
4.6 WiFiФЃПщШэМўЩшМЦ 37
4.6.1 WiFiжїГЬађ 37
5 ЯЕЭГЕїЪд 39
6 змНс 41
ВЮПМЮФЯз 42
|
