宇通ZK6579校车转向系统设计(英文版)(含CAD零件装配图)
来源:56doc.com 资料编号:5D22541 资料等级:★★★★★ %E8%B5%84%E6%96%99%E7%BC%96%E5%8F%B7%EF%BC%9A5D22541
资料以网页介绍的为准,下载后不会有水印.资料仅供学习参考之用. 密 保 惠 帮助
资料介绍
宇通ZK6579校车转向系统设计(英文版)(含CAD零件装配图)(任务书,开题报告,外文翻译,文献摘要,论文说明书英文版8500字,CAD图5张)
Design of steering system of Yutong ZK6579 School bus
Abstract
With the increasing popularity of school buses, people pay more and more attention to the safety of school buses. The design of a reasonable school bus steering system is of great significance to ensure the safety of students.
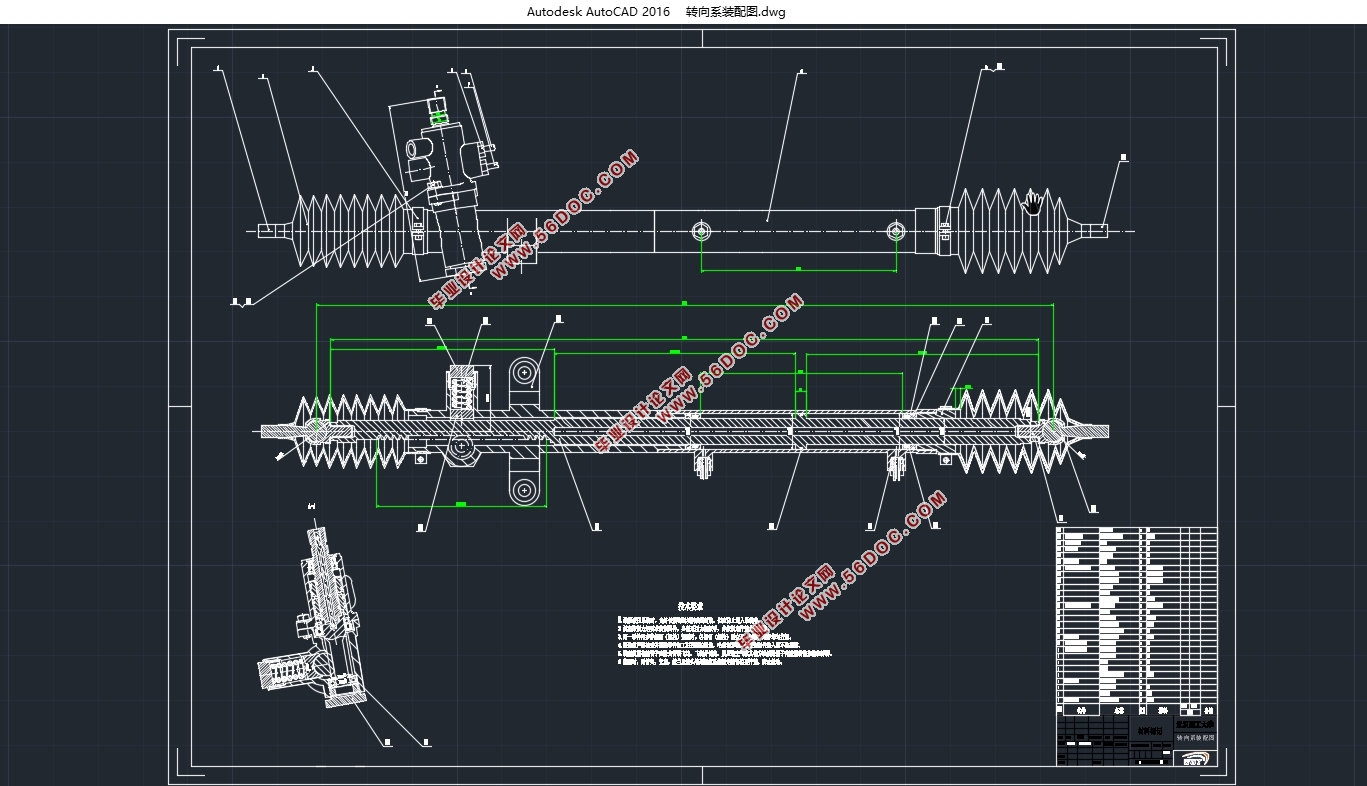
This paper takes the Yutong school bus as the research object and compares the advantages and disadvantages of different steering systems. And then according to the actual situation of the school bus. The hydraulic power steering system of gear and rack is designed.
The main contents of this paper include comparing different types of steering gear and power system, the design scheme is selected according to the specific situation of Yutong school bus, and finally the gear rack steering gear and hydraulic power system are selected. It also includes the selection and calculation of the parameters of gear rack steering gear. The hydraulic cylinder, steering valve and piston stroke in the assist system are calculated. Finally, the strength of the main components in the steering system is carried out. It includes checking the tooth surface contact fatigue strength and the tooth root bending fatigue strength of the gear rack. Finally, the assembly drawing and part drawing of the whole steering system are drawn.
Key words: school bus; steering system; hydraulic power; rack and pinion; strength check
Main parameters of design target vehicle
Table 2.1 basic parameters of Yutong School bus
Length × width × height (mm) 5740×1920×2580
Wheelbase 3300mm
Front wheel distance 1606mm
Full load mass 4070kg
Number of steering wheel turns 2.5
Steering wheel diameter 450mm
Front tire specification 205/55 R16
Maximum speed 80km/h
Tire pressure 0.255MPa
Load distribution of front and rear axles Front axle Rear axle
Full load 40.00% 60.00%
Catalogue
Chapter 1: Introduction 1
1.1 The purpose and significance of subject Research 1
1.2 Research status at home and abroad 1
1.2.1 Research status of steering system 1
1.2.2Research status of steering gear 4
1.3Requirements for steering systems 5
1.4The research content of this subject 5
1.5Expected target 6
Chapter 2:Determination of main body Design Scheme and parameters 7
2.1 Requirements for power steering mechanisms 7
2.2Selection of Gear and Rack steering gear 7
2.3Main parameters of design target vehicle 8
2.4Calculation of steering angle and steering system angle transmission ratio 8
2.5 Summary of this chapter 9
Chapter 3Design of Mechanical part of steering Gear 10
3.1 Design of geometric size structure of Gear and Rack 10
3.2The relationship between Gear and Rack geometric Transmission 10
3.3Summary of basic parameters of gear and rack 12
3.4Gear strength check 13
3.4.1 Tooth surface contact strength 13
3.4.2Check of contact fatigue strength of tooth surface 14
3.4.3Tooth root bending fatigue strength 14
3.4.4Check of tensile strength of rack compression bar 15
3.5Summary of this chapter 16
Chapter 4 Design of hydraulic assist system 17
4.1 Composition and principle of hydraulic Power steering system 17
4.11 Composition of rotating Valve hydraulic Power steering system 17
4.12 Principle of hydraulic Power steering system 18
4.2Design and calculation of Power cylinder of hydraulic Auxiliary system 18
4.2.1 Rated pressure of hydraulic system pn 18
4.2.2Total efficiency of hydraulic cylinder 19
4.2.3Theoretical Force of hydraulic cylinder F 19
4.2.4Cylinder inner diameter D 19
4.2.5 Calculation of Wall thickness of Power cylinder 19
4.2.6Piston stroke S 20
4.2.7Minimum guide length 20
4.3Design and calculation of rotating Valve Control Valve 20
4.3.1Factors affecting the characteristics of rotating valve 20
4.3.2Design of spool edge 21
4.3.3Limiting mechanism 21
4.4Design of steering bar and its end 22
4.5Rack clearance adjusting device 22
4.6 Torsion bar design 23
4.7Steering control mechanism design 24
4.8 Summary of this chapter 25
Conclusion 26
Reference 27
Thanks 29
|
