面向安全的自动驾驶汽车总体布置设计(英文版)(含CAD图)(任务书,开题报告,外文翻译,文献摘要,论文说明书英文版9000字,CAD图5张)
Abstract
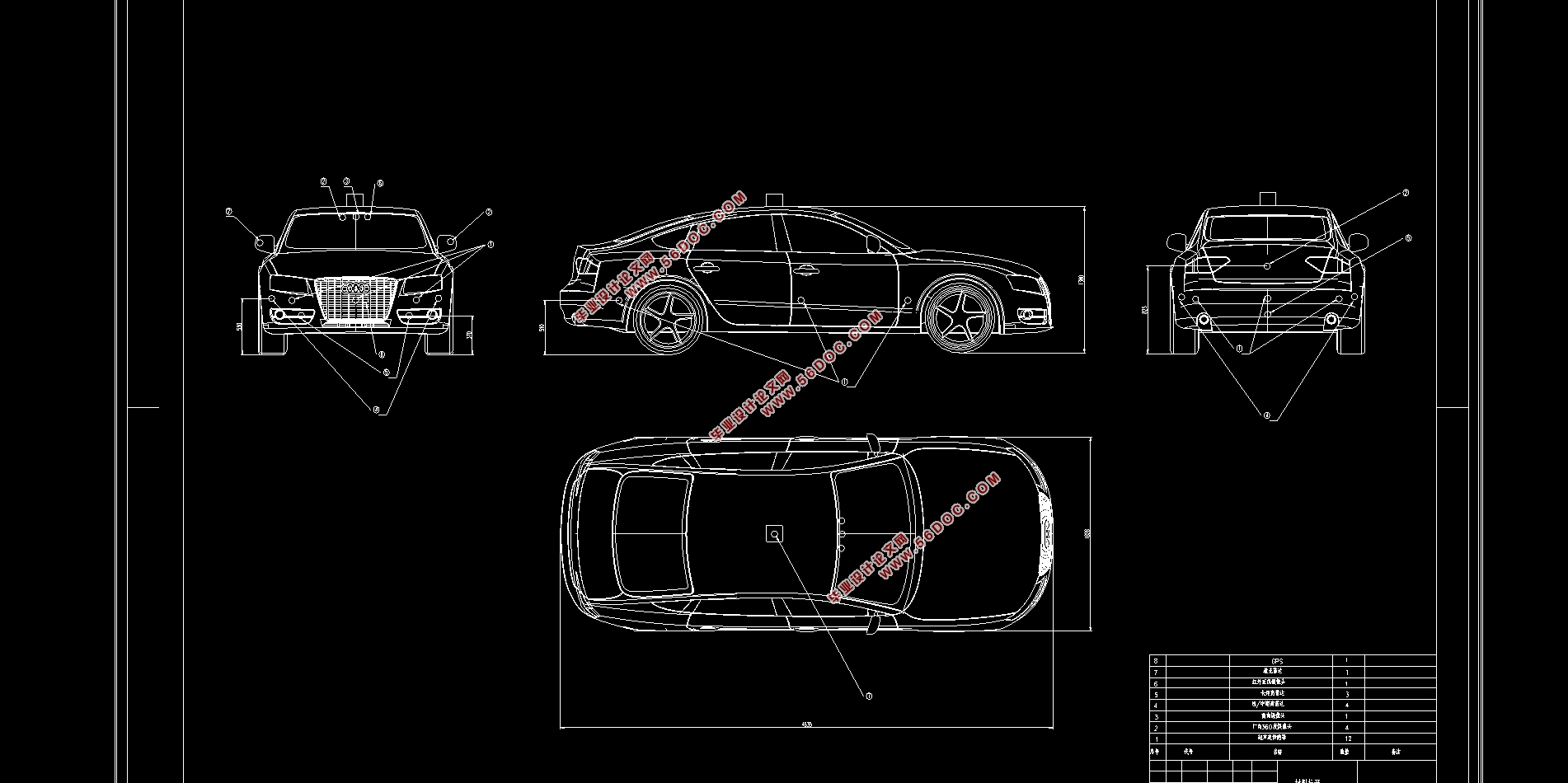
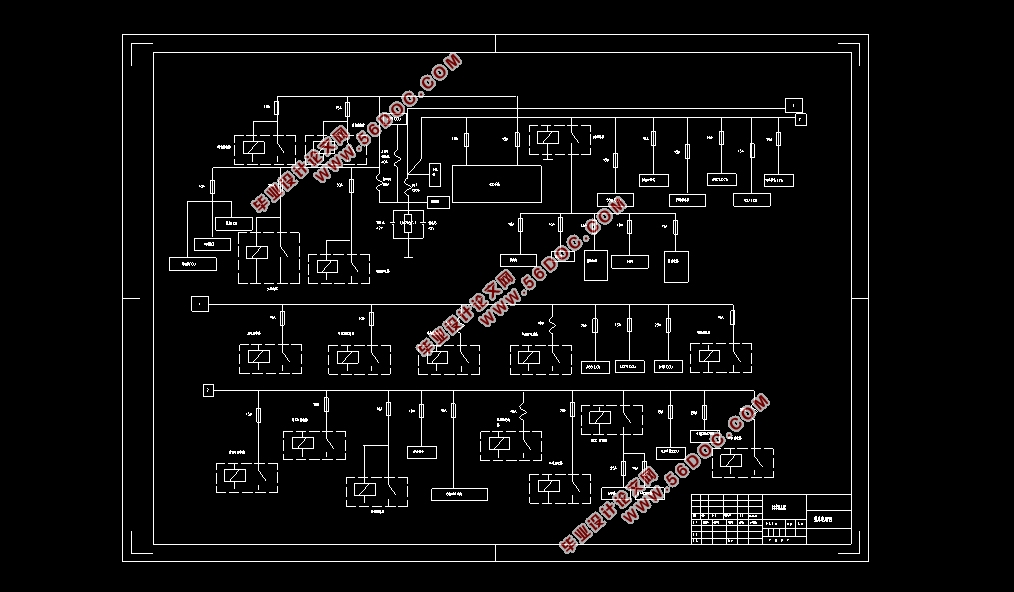
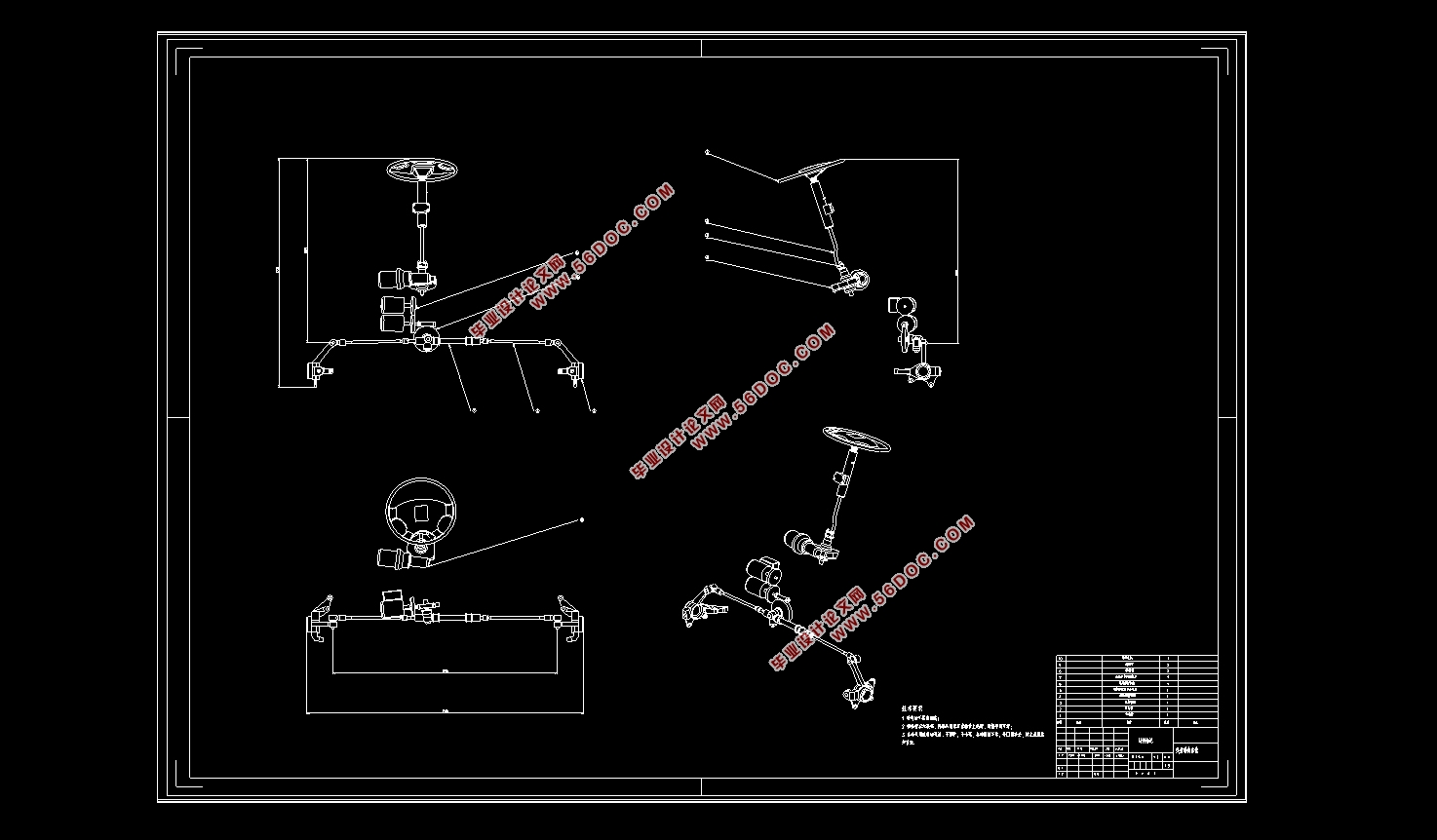
This paper intends to explore and study how to reasonably layout design the sensor of the self-driving car, to ensure the safety of the self-driving car. At the same time, the design of the dual-bus and vehicle circuit distribution of the self-driving car is needed, and the circuit structure and data transmission difference between the self-driving car and the conventional car are clarified. Of course, it should also consider the reliability redundancy design of the car, such as the design of the dual controller, dual actuator and dual power system.
By consulting relevant literature, we can understand the working principle and structural composition of self-driving car, and study the feasibility of the project objectives. Learning and studying the principles and characteristics of related sensors (including cameras, radars) of the Context-Aware system, we design and optimize the optimal redundancy, and ensure that the self-driving car sensor arrangement can bring enough security. Understanding the working principle of CAN bus, we know the data communication mode between components, and divide the CAN network nodes in a targeted manner to optimize the node layout while ensuring normal data communication. To consult the relevant literature to understand the driving safety redundancy design of self-driving cars, and we develop a dual-controller, dual-actuator, dual-supply and dual-bus system design for self-driving cars to ensure that a car can still operate normally withfaults in some components and systems. On the basis of the above, we organize all the data, and use the drawing software to design the layout and draw the relevant drawings.
Through design analysis, this paper has a relatively systematic normative design on the overall layout of self-driving car, and has a solution to the redundant design of autonomous vehicles, which has certain practical significance.
Key Words:Redundant design; Vehicle circuit; Bus design; Context-Aware system.

Contents
Abstract I
Chapter 1 Introduction 1
1.1 Research background 1
1.2 Research status at home and abroad 1
1.3 Research work and thesis structure of this paper 3
Chapter 2 Context-Aware system of the Self-driving car 4
2.1 Related background of self-driving cars 4
2.1.1 Classification of self-driving cars 4
2.1.2 Related Sensors of the Context-Aware system 5
2.2 The Context-Aware technology solution of Self-driving car 6
2.3 Design of Context-Aware system 7
2.3.1 Vehicle Motion Module 7
2.3.2 Context-Aware Module 8
Chapter 3 Communication bus design of the Self-driving car 14
3.1 Automotive Communication Bus 14
3.2 Self-driving car bus design 14
3.2.1 CAN bus design 15
3.2.2 FlexRay bus design 19
3.3 Dual bus design of the Self-driving car 19
Chapter 4 Power supply circuit design of the Self-driving car 22
4.1 Dual power supply design 22
4.2 Vehicle power distribution map design 23
Chapter 5 Redundant design of self-driving car actuator 25
5.1 The meaning of the redundant design of the actuator 25
5.2 Redundant Steering System Design 25
5.2.1 Steer by wire system 25
5.2.2 Redundant design of the SBW 26
5.3 Redundant design of the braking system 27
5.3.1 Electronic Hydraulic Brake System 27
5.3.2 Redundant design of the EHB 28
Conclusion and Outlook 30
References 31
Acknowledgement 33
|
