微型无人驾驶电动物流车总布置设计(含CAD图)(任务书,开题报告,文献摘要,论文说明书12000字,CAD图4张,程序代码)
摘 要
随着在世界范围内的汽车数量的迅速增长,汽车为人们的生活带来了方便,也造成了一系列如交通拥堵、交通事故频发等问题。本论文的目的是为了物流的可靠性和安全性,减轻物流人员和场地的压力,研究一种能载货自动驾驶的电动汽车,以实现自动驾驶汽车能够安全并准确地将货物运送到目标位置。
本论文阐述了微型无人驾驶电动物流车的研究意义、国内外无人驾驶电动物流车的现状。分析了对微型无人驾驶电动物流车的需求并进行设计。研究了无人驾驶电动物流车的动力性需求,并进行最高速度,最大爬坡度的计算,对电机的布置方法的优缺点进行了分析,选择。
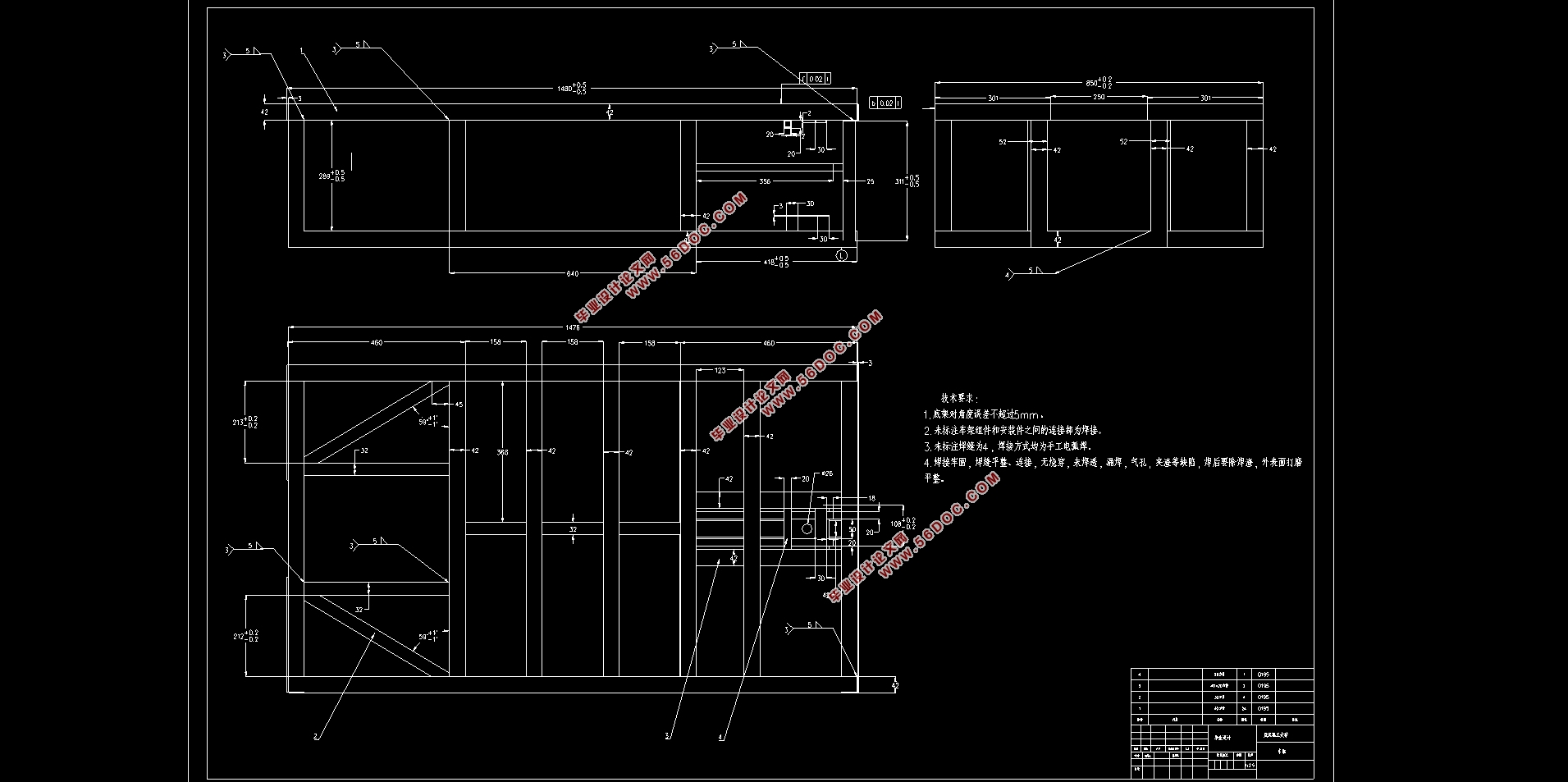
在确定了驱动桥的型号与尺寸后,依据驱动桥所需电压,整车尺寸大小,选择合适大小的电池。根据整车需要以及车架的功用,零部件及电池包、控制器的空间需要,计算设计车架并仿真校核。
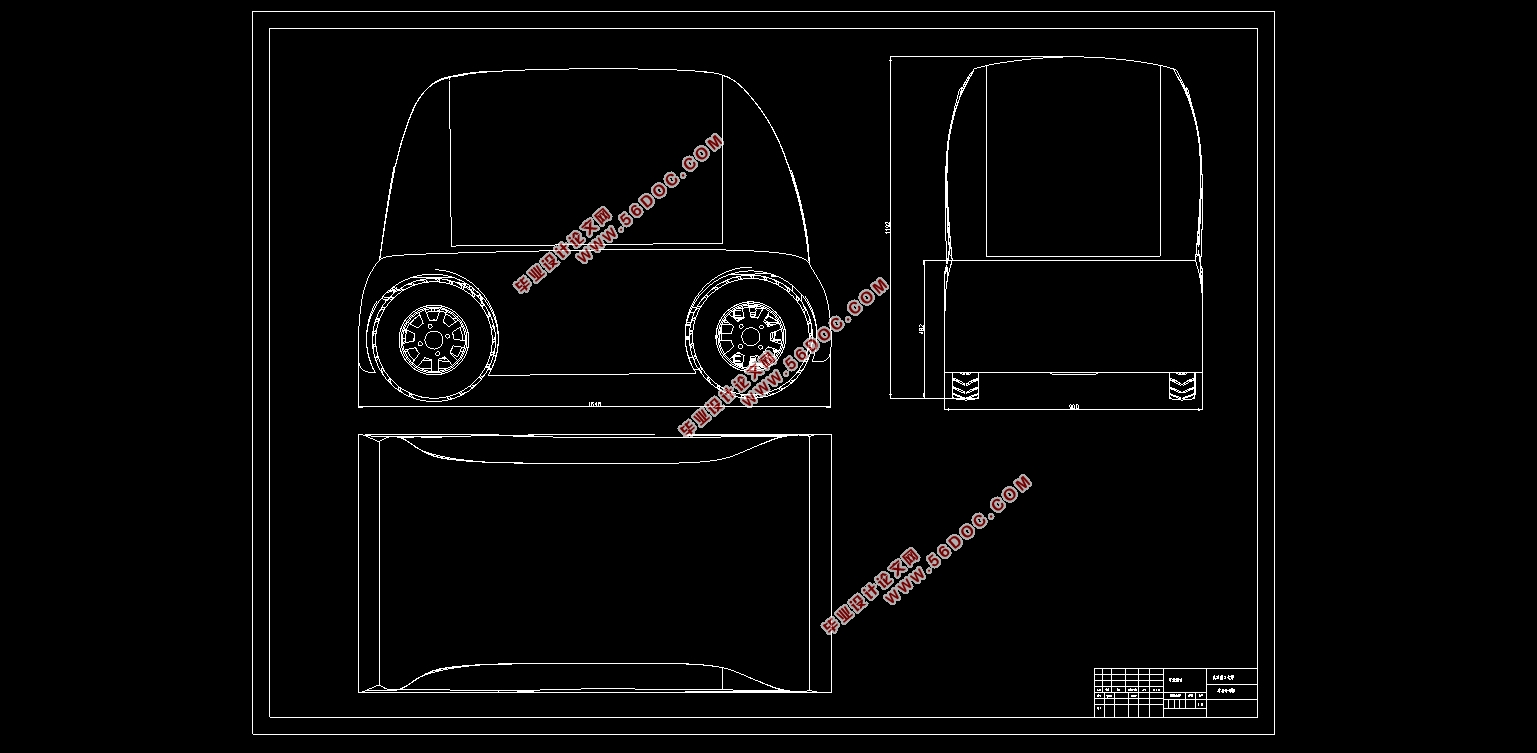
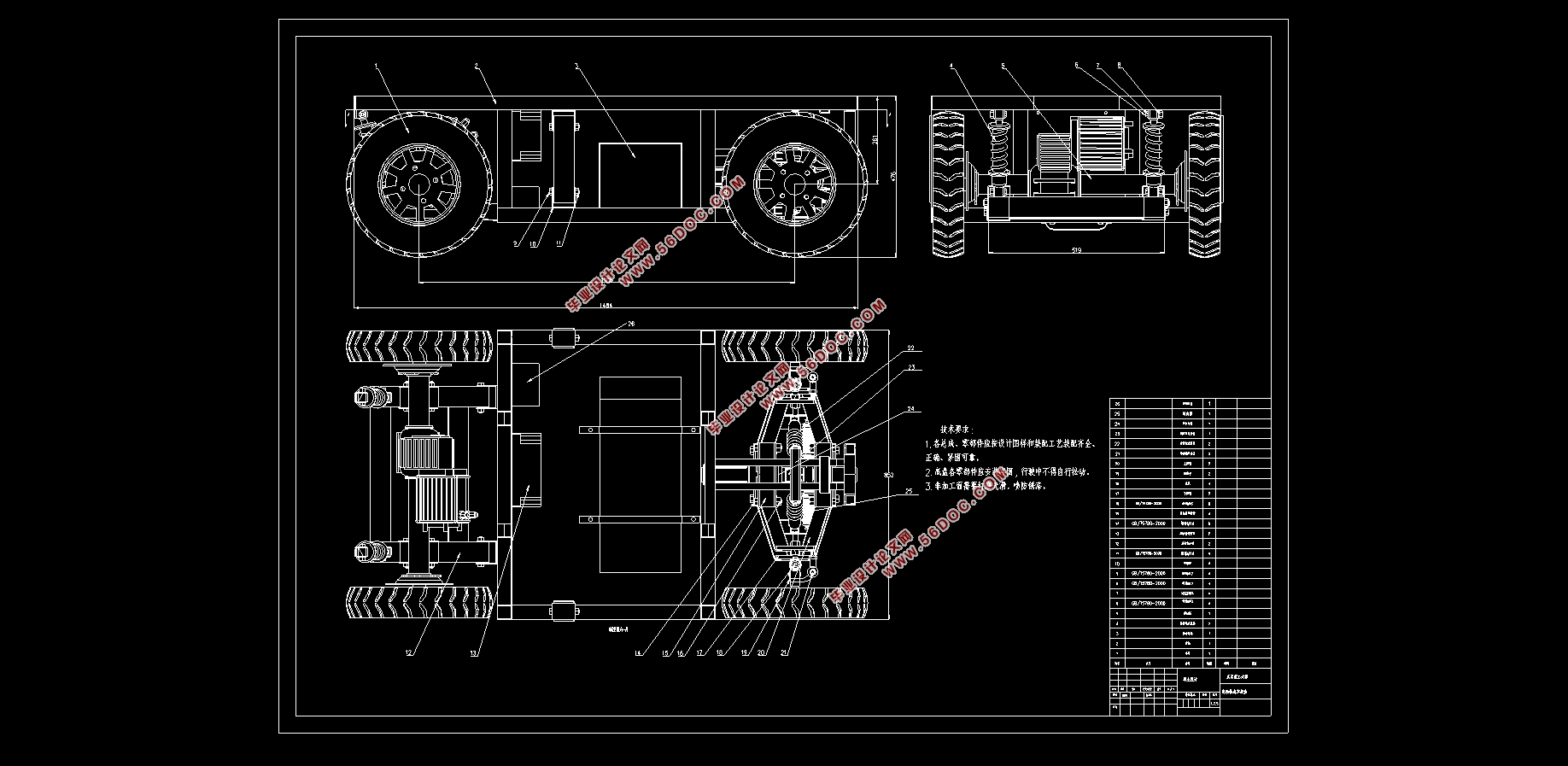
根据整车质量以及对悬架的要求,选择了前后悬架,结合转向,制动系统得出了整车总布置设计的方案,并绘制了整车的总布置图及外形设计效果图。
关键词:无人驾驶;电动汽车;物流车;总布置
Abstract
With the rapid growth of the number of cars in the world, cars have brought convenience to people's lives, and have also caused a series of problems such as traffic congestion and frequent traffic accidents. The purpose of this thesis is to reduce the pressure on logistics personnel and the site for the reliability and safety of logistics, and to study an electric vehicle capable of driving and driving automatically, so that the self-driving car can safely and accurately transport the goods to the target position.
First,this paper expounds the research significance of micro-unmanned electric logistics vehicles and the status quo of unmanned electric logistics vehicles at home and abroad. The demand for miniature driverless electric logistics vehicles was analyzed and designed. The power demand of the unmanned electric logistics vehicle was studied, and the calculation of the maximum speed and the maximum grade was carried out. The advantages and disadvantages of the motor layout method were analyzed and selected.
Second,after determining the model and size of the transaxle, select the battery of the appropriate size according to the voltage required by the transaxle and the size of the vehicle.
Finally,according to the needs of the whole vehicle and the function of the frame, the space requirements of the parts and battery packs and controllers, calculate the design frame and simulate the check. According to the quality of the whole vehicle and the requirements of the suspension, the front and rear suspensions were selected, combined with the steering, the braking system was used to obtain the overall layout design of the whole vehicle, and the overall layout drawing and shape design renderings of the whole vehicle were drawn.
Keywords:driverless vehicle;electric vehicle;logistics vehicle; layout design
1.3课题主要研究内容
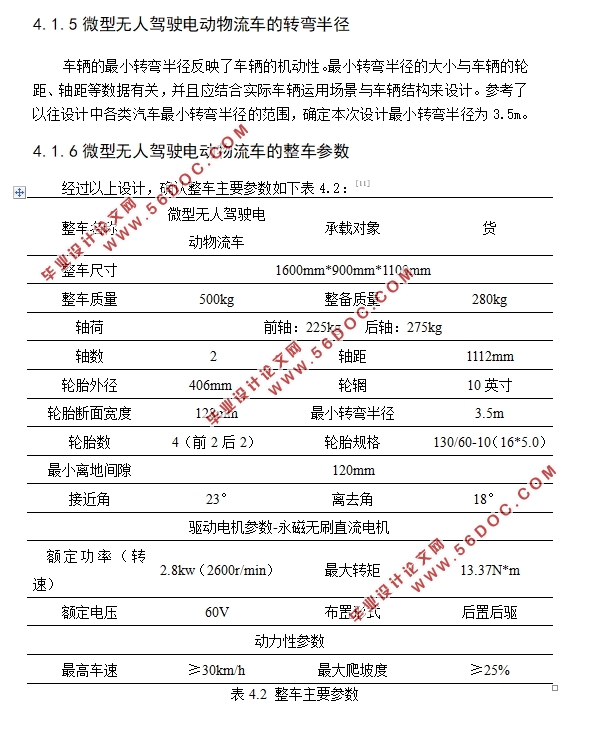
(1)确定微型无人物流车整体结构和基本尺寸,进行最高速度,最大爬坡度计算,计算确定汽车的最小转弯直径,汽车通过性参数,汽车行驶平顺性参数,制动性参数,据计算数据以及通讯要求,选择功率及尺寸合适的后驱动桥;
(2)根据驱动桥型号与尺寸,计算确定轮胎轮毂、转向节等底盘各零部件和总成的技术参数,并考虑实际成本,进行列表比较后,选择出最适合本车的底盘各零部件;
(3)依据整车尺寸大小,选择合适大小的电池;
(4)根据整车需要以及车架的功用,零部件及电池包、控制器的空间需要,设计计算车架,并校核车架的扭转刚度,车架的载荷工况及强度;
(5)设计计算车轮外倾角,主销后倾角,主销内倾角,主销偏移距,前轮前束,车轮定位参数的变化;
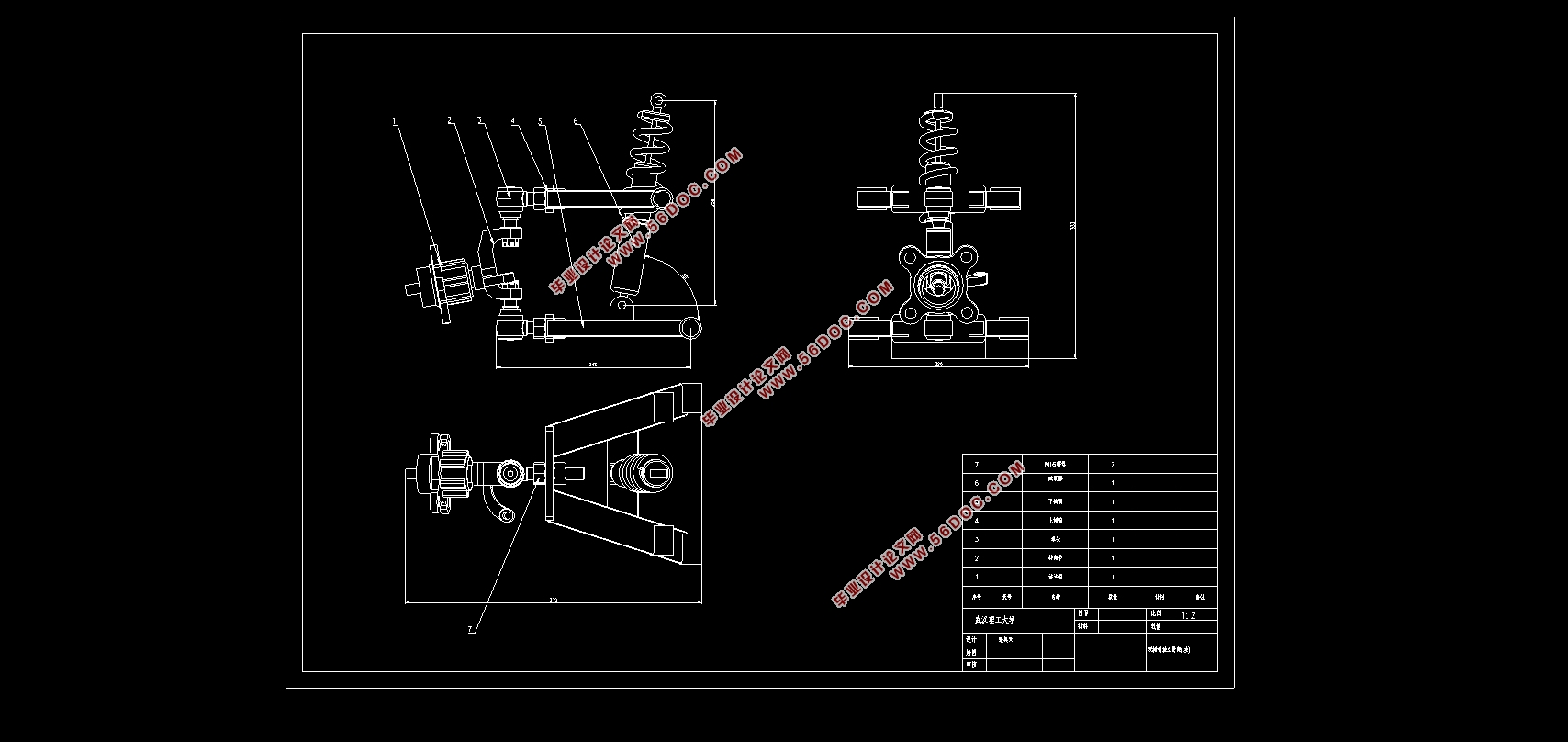
(6)根据整车质量以及对悬架的要求,进行前后悬架静挠度和动挠度的选择,悬架侧倾中心高度与轮距变化,侧倾角刚度的计算,以及汽车稳态转向时车身侧倾角及侧倾角刚度在前、后悬架上的分配,根据上述计算结果选择悬架类型为双横臂式独立悬架,根据整车尺寸,在螺旋弹簧和钢板弹簧之间选择螺旋弹簧加空气弹簧,并进行计算选型;
(7)进行车身外形设计,绘制整车总布置图,三视图,外形设计效果图。
目录
第1章 绪 论 1
1.1 研究背景及意义 1
1.2 国内外微型无人驾驶电动物流车发展现状 1
1.3 课题主要研究内容 3
第2章 总布置设计设计理论、设计方案 5
2.1 总布置设计内容及原则 5
2.2 设计理论 6
第3章 总体设计计算和驱动电机选型 7
3.1 整车数据确定 7
3.1.1 整车整备质量m0估算 7
3.2 驱动电机的选型 8
3.2.1驱动电机的功率 8
3.2.2驱动电机转速与转矩的选择 9
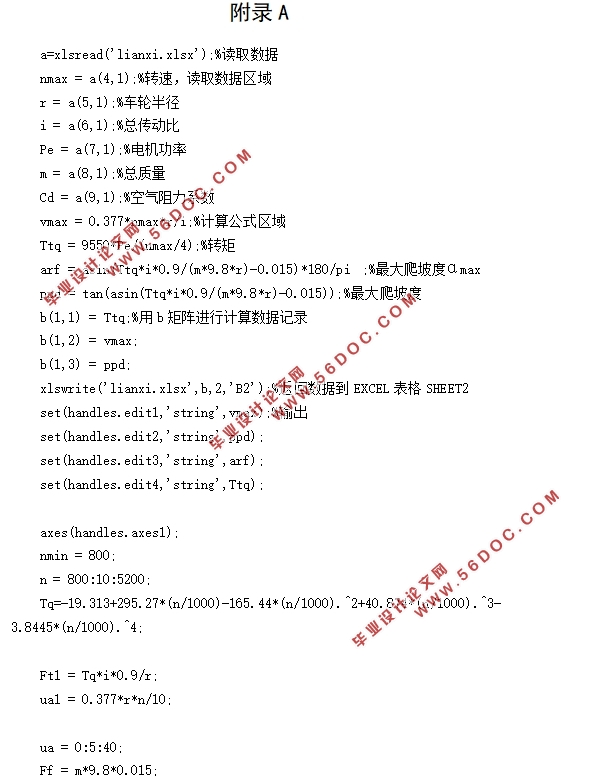
3.3动力性计算GUI 11
第4章 底盘与车身的设计 13
4.1 车架的设计 13
4.1.1 微型无人驾驶电动物流车的轮距的确定 13
4.1.2 微型无人驾驶电动物流车的轴距确定 14
4.1.3 车轮的选型 14
4.1.4微型无人驾驶电动物流车通过性参数 15
4.1.5 微型无人驾驶电动物流车的转弯半径 16
4.1.6 微型无人驾驶电动物流车的整车参数 16
4.1.7微型无人驾驶电动物流车的车架设计 17
4.2 悬架的设计 17
4.2.1前、后悬架静挠度与动挠度的计算 17
4.2.2 前后悬架的选取 18
4.3 车身的设计 21
4.3.1 车身尺寸的确定 21
4.3.2车身造型 22
4.4 车架有限元分析应力仿真 23
4.5 转向系统的布置 23
4.6 微型无人驾驶电动物流车外形 24
第5章 总结与展望 25
参考文献 26
附录A 28
致谢 30
|
