纯电动轮毂电机越野车动力系统匹配设计(含CAD图)(任务书,开题报告,文献摘要,外文翻译,论文说明书11000字,CAD图3张)
摘要
节能、环保和安全是如今汽车行业的三大主题,纯电动汽车具有低排放,比功率高的优点,同时轮毂电机驱动汽车结构简单、效率高、转矩独立可控,而且可实现底盘智能化,是未来汽车发展的方向之一。
本文以某越野车为研究对象,分析其行驶的道路状况,在提高整车动力性需求以及整车空间布置等约束下,采用分布式轮毂电机独立驱动结构。然后根据动力性要求,对动力系统进行选型和参数匹配,确定动力系统关键部件的参数。具体过程如下。
在认真研究了整车的设计要求后,根据汽车加速性能,爬坡性能,最大车速等确定了整车所需的最大功率,而后对驱动电机进行选型和匹配,选择了四个额定功率35kw的轮毂电机,根据续航里程要求计算确定了一组600V,178Ah锂离子动力电池。轮毂电机的减速比为5。至此动力系统关键部件参数匹配完成。
后续建立纯电动越野车的仿真模型,在Cruise软件中将所计算出的传动比、电池、电机等参数输入模型,对车辆各项性能设置仿真任务,完成汽车动力性能(加速度,最高速度,续航里程等)仿真计算。
最后对仿真结果进行了综合分析,仿真结果显示:最高车速能达到126km/h,以20km/h行进能爬68.9%坡度的坡,0-80km/h加速时间为7.4s,以40km/h速度能行驶260km。动力性能满足设计要求。
关键词:纯电动汽车,轮毂电机,参数匹配,Cruise
Abstract
Energy saving, environmental protection and safety are the three themes of today's automotive industry. Pure electric vehicles have the advantages of low emissions and high specific power. At the same time, the hub motor drives the car with simple structure, high efficiency, independent torque control and intelligent chassis. advantage. Pure electric wheel hub motor can meet the requirements of energy saving and environmental protection, and is one of the future development directions of automobiles.
In this paper, an off-road vehicle is taken as the research object, and the road conditions of the road are analyzed. Under the constraints of improving the power demand of the whole vehicle and the space arrangement of the whole vehicle, the distributed wheel hub motor independent driving structure is adopted. Then according to the dynamic requirements, the power system is selected and matched with parameters to determine the parameters of the key components of the power system. The specific process is as follows.
After carefully studying the design requirements of the vehicle, the maximum power required by the vehicle was determined according to the vehicle acceleration performance, the climbing performance, the maximum vehicle speed, etc., and then the drive motor was selected and matched, and four rated powers of 35kw were selected. The hub motor, based on the cruising range requirements, determines a hybrid 600V, 178Ah lithium-ion battery. The reduction ratio of the hub motor is 5. At this point, the matching of key components of the power system is completed.
Subsequently establish a simulation model of pure electric off-road vehicle, input the calculated gear ratio, battery, motor and other parameters into the model in Cruise software, set simulation tasks for various performances of the vehicle, and complete the vehicle dynamic performance (acceleration, maximum speed). , cruising range, etc.) simulation calculation.
Finally, the simulation results are comprehensively analyzed. The simulation results show that the maximum speed can reach 126km/h, and the slope can climb 68.9% slope at 20km/h. The acceleration time of 0-80km/h is 7.4s, at a speed of 40km/h. Can drive 260km. Dynamic performance meets design requirements.
Keywords: pure electric vehicle, hub motor, parameter matching, Cruise
目录
摘要 I
Abstract II
第1章引言 1
1.1研究背景及意义 1
1.2国内外研究现状 3
1.2.1轮毂电机研究现状 3
1.2.2动力系统匹配现状 4
1.3研究内容与研究方法 5
第2章四轮独立驱动纯电动越野车动力系统的选取 6
2.1三种四轮驱动纯电动结构方案 6
2.2动力系统结构方案的选择 8
第3章动力系统参数匹配 9
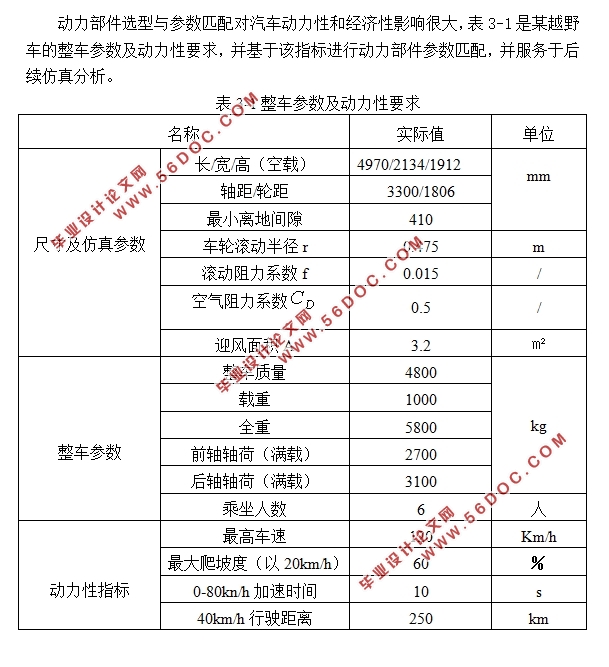
3.1车辆基本参数 9
3.2驱动电机的选型与参数确定 10
3.2.1驱动电机的选型 10
3.2.2驱动电机的参数计算 11
3.3动力电池参数确定 17
3.4 本章小结 19
第4章四轮独立驱动纯电动越野车整车建模 20
4.1选择建模仿真软件 20
4.2整车模型的搭建 20
4.2.1整车模块的搭建 20
4.2.2整车各部件信号连接 21
4.3整车各模块参数设置 21
4.3.1整车模块参数设置 22
4.3.2动力电池参数设置 22
4.3.3电机相关参数设置 23
4.4仿真结果分析 24
4.5本章小结 27
第5章总结与展望 28
5.1全文总结 28
5.2展望 29
参考文献 30
致谢 31
|
