纯电动汽车整车控制器故障诊断模式研究(任务书,开题报告,文献摘要,论文说明书35000字,CAD图3张)
摘要
随着世界各国对汽车排放性能要求越来越高,新能源汽车的成为世界各国车企发展的重要方向。2016年国务院“十三五”的战略性新兴产业规划明确了新能源汽车在我国的战略地位。在新能源汽车发展战略中,纯电动汽车是其中重要的一环。纯电动汽车的快速发展使得安全问题越发受到重视,但纯电动汽车相关的故障诊断协议标准目前还不完善,需要对此开展更多的研究以保障纯电动汽车安全运行。本文基于道路车辆统一诊断协议,研究了纯电动汽车典型故障,进行了整车控制器故障诊断功能和外部诊断系统的开发。
首先,对道路车辆统一诊断服务(Unit diagnostic services, UDS)进行了深入研究。对车载CAN网络工作方式、通信协议ISO 15765和ISO 14229的具体协议内容进行了详细的研究,并据此进行相应的故障报文传输流程设计和采用标准的故障码格式进行纯电动汽车故障编码。
其次,对纯电动汽车故障诊断功能进行研究。根据纯电动汽车驱动系统、电池管理系统、CAN网络等可能存在的故障进行分析,并制定出完善的故障判断。
最后,结合诊断通信协议和纯电动汽车故障诊断逻辑设计开发出故障诊断系统。在CodeWarrior中开发出整车控制器故障诊断模块,并使用飞思卡尔MC9S12XS系列开发板作为实验硬件,使用LabVIEW软件开发出故障注入程序和外部故障诊断系统,进行测试故障诊断模块性能测试。
本论文通过对纯电动汽车整车控制器故障诊断模式进行研究对于汽车安全的发展有积极意义。
关键词:纯电动汽车;整车控制器;故障诊断;统一诊断服务
abstract
With the increasing demand for vehicle emission performance in the world, the new energy vehicles have become an important direction for the development of car enterprises all over the world. In 2016 the State Council "13th Five-Year" strategic emerging industry planning clear new energy vehicles in a strategic position in china. In the development strategy of new energy vehicles, pure electric vehicle is one of the most important parts. The rapid development of pure electric vehicles makes the security issues more and more attention, but the pure electric vehicle fault diagnosis protocol standard is still not perfect, need to carry out more research to ensure the safe operation of electric vehicles. Based on the road vehicle unified diagnosis protocol, the fault diagnosis system and the external diagnostic equipment of the whole vehicle controller are developed.
First of all, the road vehicle unified diagnosis service (Unit diagnostic services, UDS) has been studied in depth. The contents of the specific protocol working mode, vehicle CAN network communication protocol ISO 15765 and ISO 14229 are studied in detail, and accordingly design a fault message transmission process and the corresponding standard fault code format for pure electric vehicle fault encoding.
Secondly, the fault diagnosis function of the pure electric vehicle is studied. According to the pure electric vehicle drive system, battery management system, CAN network and other possible faults analysis, and to develop a sound fault diagnosis process.
Finally, the fault diagnosis system is developed according to the diagnostic communication protocol and the fault diagnosis logic of the pure electric vehicle. A fault diagnosis system is developed in Code Warrior software, and the use of fly Carle MC9S12X S128 development board as the hardware experiment, using the Lab VIEW software fault injection system and external diagnostic instrument, test the performance of fault diagnosis system test.
In this paper, the fault diagnosis model of pure electric vehicle controller is studied, which has positive significance for the development of vehicle safety.
Key Words:Pure Electric Vehicle; VCU; Fault Diagnosis;UDS
本文主要研究内容
本文首先通过研究CAN总线通信协议,根据相关标准协议为故障诊断通信制定标准的通信格式。对UDS协议进行学习,制定故障诊断故障码等相关格式的标准。对纯电动汽车整车进行详细故障分析,将可能出现的故障进行分类并设计了详细的故障诊断逻辑。根据诊断通信协议和故障诊断逻辑,设计开发整车控制器故障诊断功能模块。并使用LabVIEW虚拟仪器设计软件设计故障注入程序和外部故障诊断系统。对设计好的整车控制器故障诊断功能模块进行性能测试,验证设计的故障诊断程序是否具有实用性。
目录
第1章绪论 1
1.1 论文研究的背景及意义 1
1.2 纯电动汽车及其故障诊断模式研究现状 3
1.2.1 纯电动汽车发展现状 3
1.2.2 电动汽车控制系统研究现状 4
1.2.3 故障诊断系统研究现状 6
1.3 本文主要研究内容 6
第2章 CAN总线原理及诊断协议标准 8
2.1 CAN通信协议及车载故障诊断网络简介 8
2.2 CAN总线原理 9
2.2.1 CAN总线结构原理 9
2.2.2 CAN总线节点分层结构 10
2.2.3 CAN总线技术规范 12
2.3 诊断协议标准 15
2.3.1 诊断通信流程及方式 15
2.3.2 诊断通信定时设置 16
2.3.3 诊断通信服务 17
2.3.4 故障诊断码格式 17
2.4 本章小结 19
第3章纯电动汽车整车控制器故障诊断功能 20
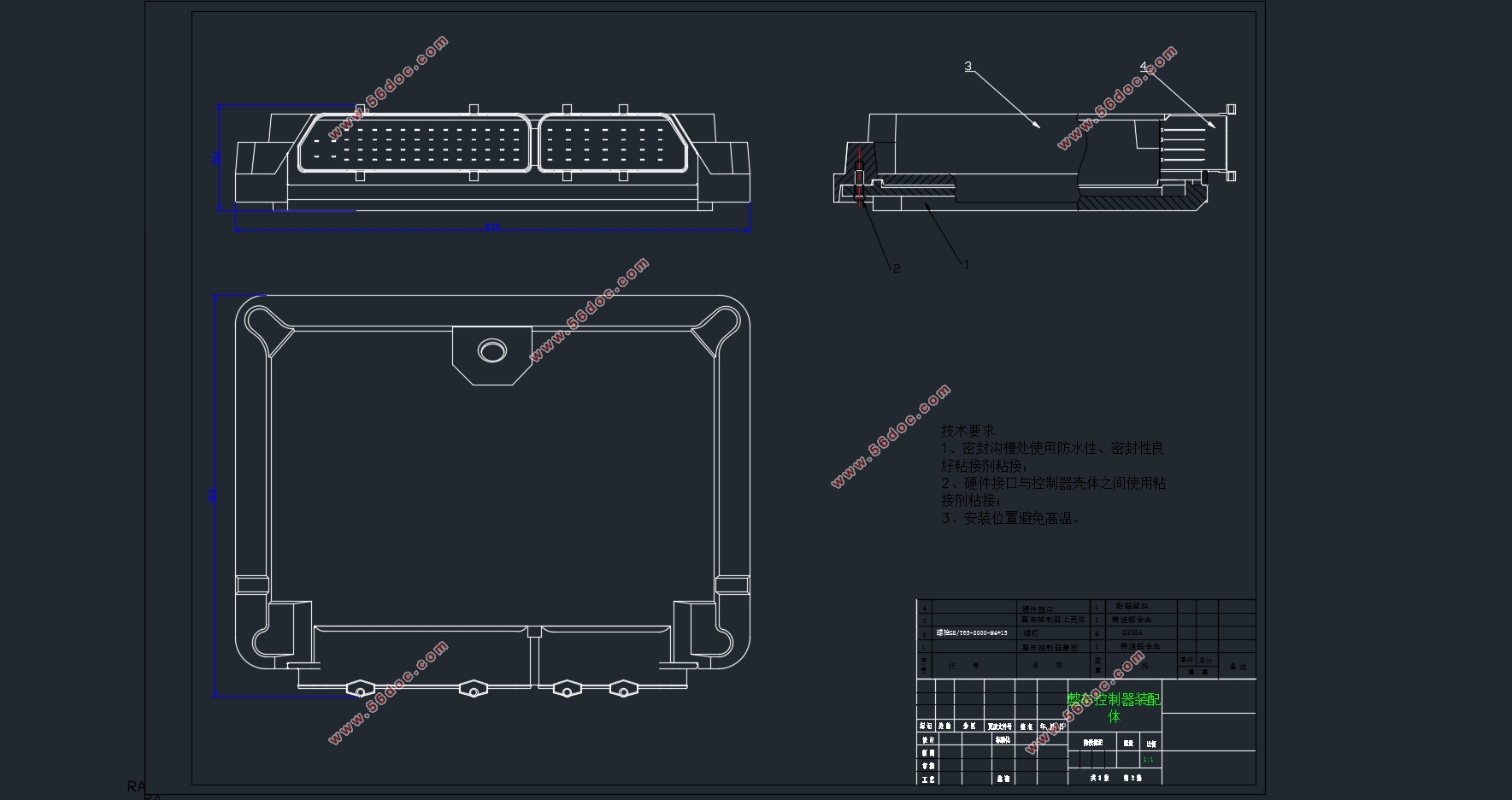
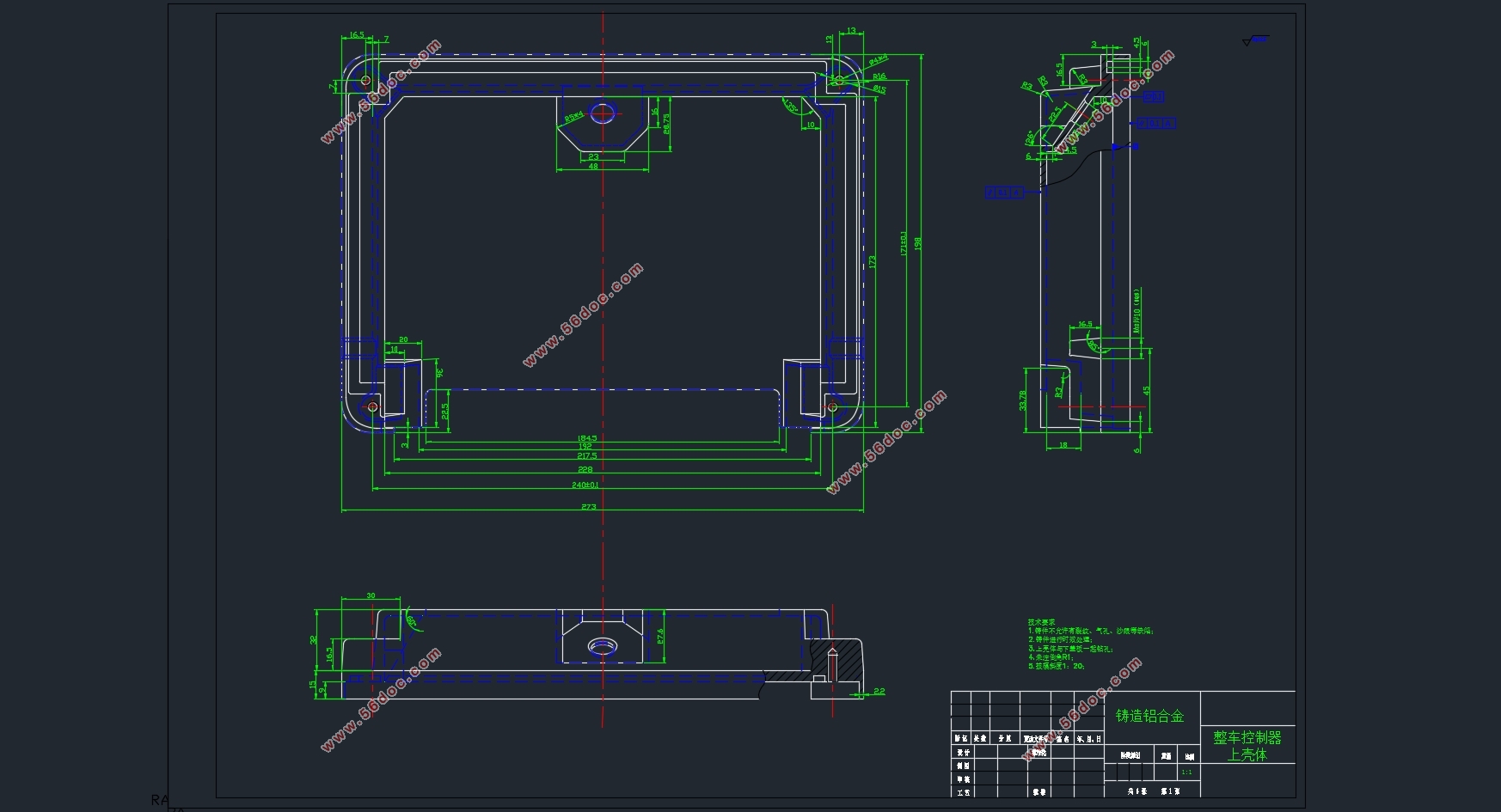
3.1 纯电动汽车整车控制器 20
3.2 VCU诊断对象及诊断方式 21
3.2.1 故障诊断监控对象 21
3.2.2 故障诊断方式 21
3.3 驱动系统故障 23
3.3.1 常见故障 23
3.3.2 驱动系统故障处理策略 24
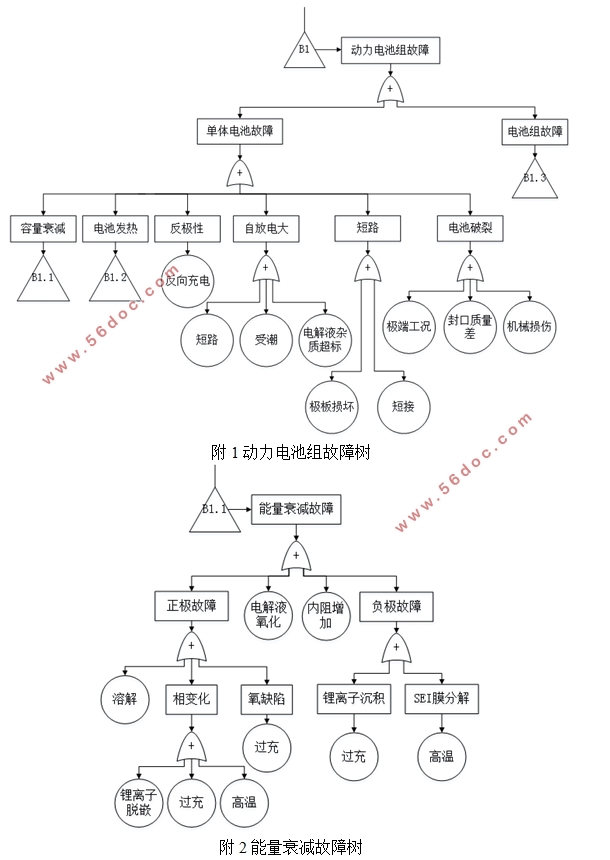
3.4 动力电池故障 27
3.4.1常见故障 27
3.4.2 电池管理系统故障处理策略 29
3.5 CAN网络通信故障 30
3.5.1 常见故障 30
3.5.2 CAN网络故障处理策略 31
3.6 整车控制器故障诊断功能 31
3.6.1 故障分级 32
3.6.2 故障处理原则 32
3.6.3 VCU故障诊断策略 33
3.7 本章小结 37
第4章整车控制器故障诊断系统开发 38
4.1 整车控制器硬件选型 38
4.1.1整车控制器硬件设计需求 38
4.1.2 故障诊断模块硬件选型 39
4.2 整车控制器故障诊断模块程序设计 40
4.2.1 诊断模块开发环境CodeWarrior介绍 40
4.2.2 诊断模块程序开发 40
4.3 故障诊断系统开发 43
4.3.1 上位机软件开发环境LabVIEW介绍 43
4.3.2 模拟信号注入程序 44
4.3.3 CAN通信故障注入程序 46
4.3.4 故障诊断系统开发 48
4.4 故障诊断系统的测试 50
第5章总结与展望 52
5.1 全文总结 52
5.2 未来展望 52
参考文献 54
附录A 动力电池组故障树 56
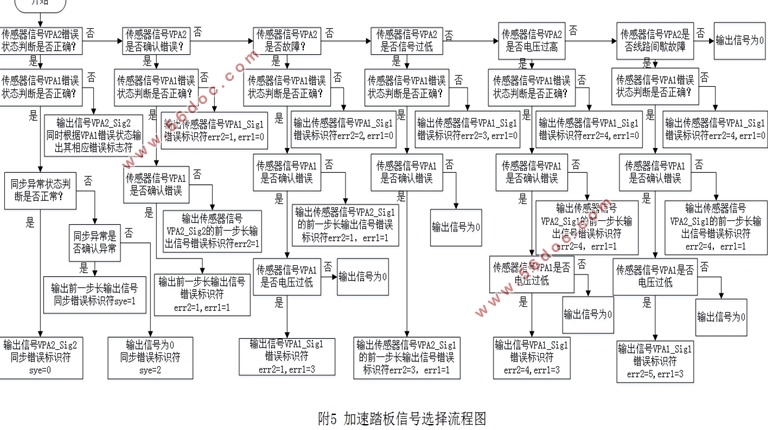
附录B 两路加速踏板信号选择流程图 59
附录C 整车控制器故障诊断程序 60
附录D 故障编码 68
致谢 72
|
