搬运机械手结构设计(含CAD零件装配图)(任务书,文献综述,设计说明书16200字,CAD图纸4张)
摘要
用于再现人手的功能的技术装置称为机械手。机械手是模仿着人手的部分动作,按给定程序,轨迹和要求实现自动抓取,搬运或操作的自动机械装置。
工业机械手是近代自动控制领域中出现的一项新技术,并已成为现代机械制造生产系统中的一个重要组成部分,这种新技术发展很快,捉奸成为一门新兴的学科—机械手工程。机械手涉及到力学,机械学,电气液压技术,自动控制技术,传感器技术和计算机技术等科学领域,是一门跨学科综合技术。
随着工业自动化发展的需要,机械手在工业应用中越来越重要。文章主要叙述了机械手的设计计算过程。
首先,本文介绍了机械手的作用,机械手的组成和分类,说明了自由度和机械手整体坐标的形式。同时,本文给出了这台机械手的主要性能规格参量。
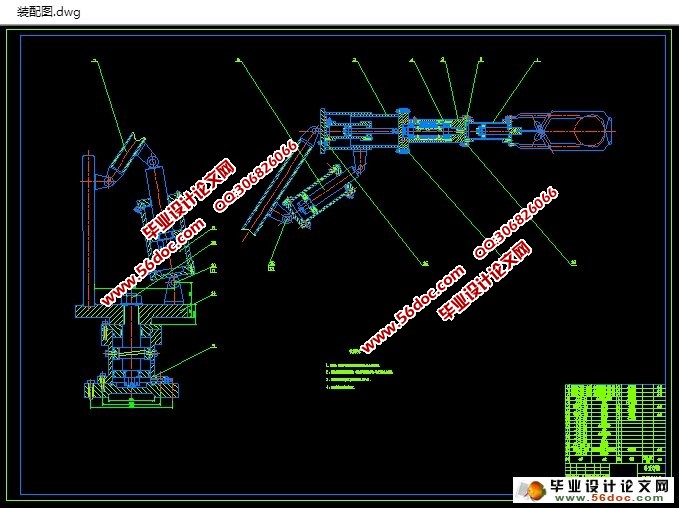
其次,文章中全面详尽地搬运机械手的手部,腕部,手臂以及机身等主要部件的结构设计。
关键词: 机械手, 自由度, 手部, 腕部
Abstract
Used to reproduce the functions of staff of the technological device called a mechanical hand. Robot is to imitate some of the staff action, according to the reproduce and requirements for automatic trajectory crawling, handing or operation of the automatic mechanical devices.
Industrial robot is in the field of modern automatic control of a new technology and machinery has become a modern production system an important component of this new technology has developed rapidly becoming an emerging discipline—mechanical hand project. Manipulator involves mechanics, mechanics, electrical hydraulic technology, such as science, is an interdisciplinary technology.
The applying of the manipulators are more and more important in the industry, with the development of industrial automation. The paper mainly narrated the design and calculation of light and transfer manipulator.
The first, the paper introduces the function, composing and classification of the manipulator, tells out the free-degree and the form of coordinate. At the same time, the paper gives out the primary specification parameter of this manipulator.
In this article, the comprehensive exhaustive discussion has transported manipulator’s hand, the wrist, the arm, the fuselage and so on, which the major structural design computation.
Key words: Manipulator, Freedom, Hand, Wrist
目 录
第一章引 言 1
第二章手部结构设计 3
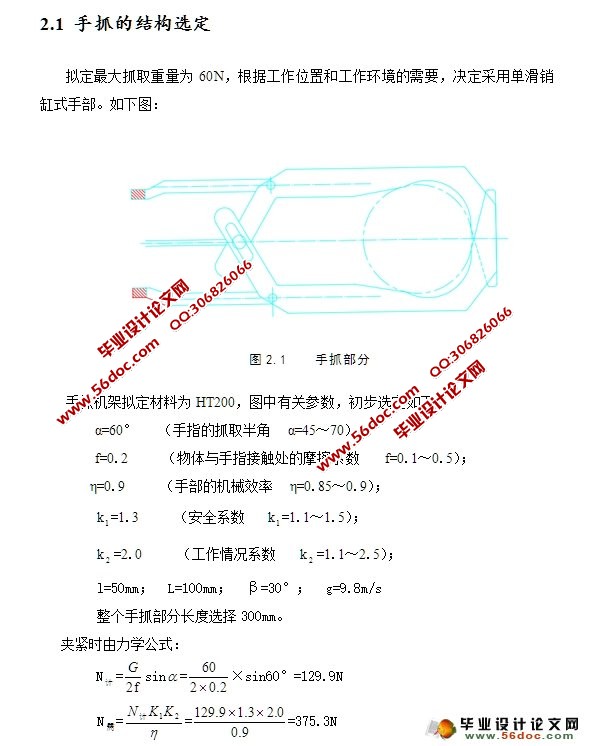
2.1 手抓的结构选定 3
2.2 液压缸的选定 4
2.2.1 液压缸内径的确定 4
2.2.2 液压缸外径的确定 4
2.2.3 缸筒壁厚校核 5
2.2.4 液压缸活塞杆的确定及校核 6
2.2.5 活塞的最大行程 6
2.2.6 缸筒底部厚度的确定 7
2.2.7 缸盖螺钉的计算 7
2.2.8 缸筒头部法兰厚度的确定 8
2.2.9 液压缸其它元件的确定 9
第三章摆动缸的选定 11
3.1 联接部分的设计 11
3.2 联接部分材料的选定与联接方法 11
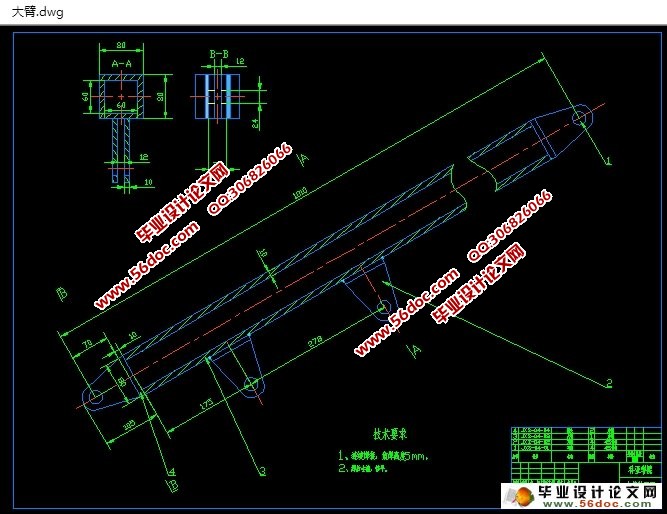
第四章手臂的结构设计 12
4.1 手臂的结构初定 12
4.2 小臂受力分析 12
4.3 小臂液压缸的确定 13
4.3.1 小臂液压缸的受力分析 13
4.3.2 液压缸内径的确定 13
4.3.3 液压缸外径的确定 14
4.3.4 缸筒壁厚校核 15
4.3.5 液压缸活塞杆的确定及校核 15
4.3.6 活塞的最大行程 16
4.3.7 缸筒底部厚度的确定 16
4.3.8 缸盖螺钉的计算 17
4.3.9 缸筒头部法兰厚度的确定 18
4.3.10 液压缸其它元件的确定 19
4.4 小臂套筒的设计 19
4.4.1 材料的选定 19
4.4.2 内套的设计 20
4.4.3 外套的设计 20
第五章支小臂液压缸的确定 21
5.1 支小臂液压缸的摆动角度确定 21
5.2 支小臂缸的受力分析 21
5.3 液压缸的确定 22
5.3.1 液压缸内径的确定 22
5.3.2 液压缸外径及壁厚的确定 22
5.3.3 缸筒壁厚的校核 23
5.3.4 液压缸活塞杆的确定及校核 24
5.3.5 活塞杆的最大允许行程 24
5.3.6 缸筒底部厚度的确定 25
5.3.7 缸盖螺钉的计算 25
5.3.8 缸盖头部法兰厚度的确定 27
5.3.9 缸筒与端部焊接 27
5.3.10 液压缸的其他元件的确定 28
第六章大臂的结构设计 29
6.1 大臂材料的选定 29
6.2 大臂受力分析 29
6.3 支大臂液压缸的确定 30
6.3.1 液压缸内径的确定 30
6.3.2 液压缸外径及壁厚的确定 31
6.3.3 缸筒壁厚的校核 32
6.3.4 液压缸活塞杆的确定及校核 32
6.3.5 活塞杆的最大允许行程 33
6.3.6 缸筒底部厚度的确定 33
6.3.7 缸盖螺钉的计算 34
6.3.8 缸盖头部法兰厚度的确定 35
6.3.9 缸筒与端部焊接 36
6.3.10 液压缸的其他元件的确定 36
第七章大臂回转缸的设计 38
7.1 回转缸的确定 38
7.1.1 回转缸的受力分析及内径的确定 38
7.1.2 液压缸外径的确定 38
7.1.3 缸筒壁厚校核 39
7.1.4 液压缸活塞杆的确定及校核 40
7.1.5 活塞的最大行程 40
7.1.6 缸筒底部厚度的确定 41
7.1.7 缸盖螺钉的计算 41
7.1.8 缸筒头部法兰厚度的确定 42
7.1.9 液压缸其它元件的确定 43
第八章底座的设计 44
8.1 底座材料及尺寸的选定 44
8.2 底板螺栓的确定 44
8.2.1 受翻转力矩的螺栓组连接 45
8.2.2 缸盖螺钉的计算 45
第九章液压系统传动方案的确定 47
9.1 各液压缸的换向回路 47
9.2 调速方案 47
第十章计算和选择液压元件 48
10.1 阀的种类和功用 48
10.2 拟定液压系统 49
10.3 油泵的选择 49
10.4 液压系统中的辅助装置 50
第十一章液压系统原理图 52
结 论 54
致 谢 55
参考文献 56
|