ШЋздЖЏеЊЙћЛњЕФДДаТЩшМЦ(КЌCADСуМўзАХфЭМ,SolidWorks,IGSШ§ЮЌЭМ)
РДдДЃК56doc.com зЪСЯБрКХЃК5D16047 зЪСЯЕШМЖЃКЁяЁяЁяЁяЁя %E8%B5%84%E6%96%99%E7%BC%96%E5%8F%B7%EF%BC%9A5D16047
зЪСЯвдЭјвГНщЩмЕФЮЊзМ,ЯТдиКѓВЛЛсгаЫЎгЁ.зЪСЯНіЙЉбЇЯАВЮПМжЎгУ. Ум БЃ Лн Аяжњ
зЪСЯНщЩм
ШЋздЖЏеЊЙћЛњЕФДДаТЩшМЦ(КЌCADСуМўзАХфЭМ,SolidWorks,IGSШ§ЮЌЭМ)(ТлЮФЫЕУїЪщ10800зж,CADЭМжН12еХ,SolidWorksШ§ЮЌЭМ,IGSШ§ЮЌЭМ)
БОПЮЬтРДдДХЉвЕЯрЙиеЊЙћЛњ——еЊЙћЛњЁЃЫцзХеЊЙћЛњММЪѕЕФЗЂеЙЙњФкЭтПЊЪМЬНЫїЯрЙиМММАЯШНјГЩЙћгІгУдкХЉвЕСьгђЃЌЦфжаЙћЪЕВЩеЊЪеИюеЊЙћЛњЪЧХЉвЕСьгђжаЯрЖдДѓЕФБШжиЃЌЯрЙиеЊЙћЛњЫцзХММЪѕНјВНМАЯрЙиОбщЕФГЩЪьЛсЮЊШЫУЧНтЗХРЭЖЏСІЁЂЬсИпЙЄзїаЇТЪЕШЗНУцгаВЛПЩЙРСПЕФЧАОАЁЃ
БОЮФдЫгУДѓбЇЫљбЇжЊЪЖЃЌЩшМЦСЫвЛПюТжЪНеЊЙћЛњЃЌБОеЊЙћЛњЭЈЙ§ТжЪНЕзВПНсЙЙПЩздгЩааНјВЂгУ5жсЪНЛњаЕБлНсЙЙПЩгааЇВЩеЊЙћЪїЩЯЕФЦЛЙћЁЃЮЊНјвЛВНЬНЫїЦЛЙћВЩеЊЯрЙиеЊЙћЛњЕФбаЗЂЬсЙЉСЫЯрЙиОбщМАвРОнЃЌВЂЖдНјвЛВНТлжЄЯрЙиММЪѕгаСЫЪЕбщЕФеЊЙћЛњЁЃ
ЙиМќзжЃКеЊЙћЛњЁЂХЉвЕЃЌЦЛЙћВЩеЊЃЌТжЪНеЊЙћЛњ
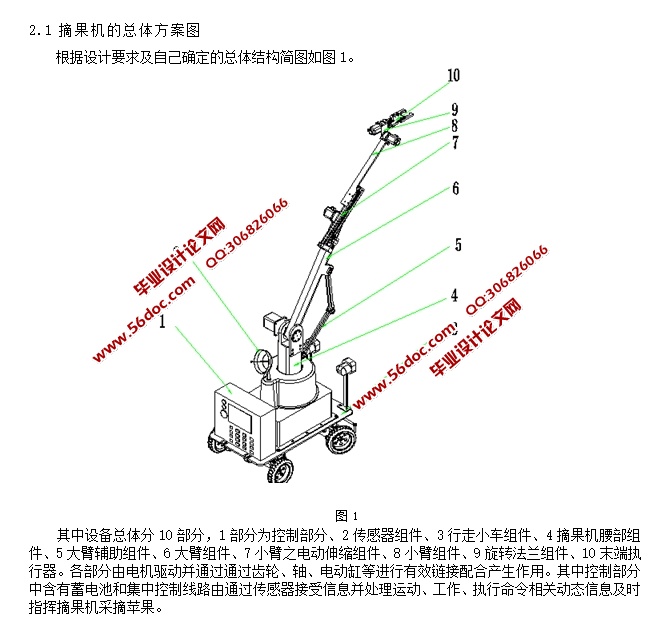
2.1 еЊЙћЛњЕФзмЬхЗНАИЭМ
ЦфжаЩшБИзмЬхЗж10ВПЗжЃЌ1ВПЗжЮЊПижЦВПЗжЁЂ2ДЋИаЦїзщМўЁЂ3аазпаЁГЕзщМўЁЂ4еЊЙћЛњбќВПзщМўЁЂ5ДѓБлИЈжњзщМўЁЂ6ДѓБлзщМўЁЂ7аЁБлжЎЕчЖЏЩьЫѕзщМўЁЂ8аЁБлзщМўЁЂ9а§зЊЗЈРМзщМўЁЂ10ФЉЖЫжДааЦїЁЃИїВПЗжгЩЕчЛњЧ§ЖЏВЂЭЈЙ§ЭЈЙ§ГнТжЁЂжсЁЂЕчЖЏИзЕШНјаагааЇСДНгХфКЯВњЩњзїгУЁЃЦфжаПижЦВПЗжжаКЌгааюЕчГиКЭМЏжаПижЦЯпТЗгЩЭЈЙ§ДЋИаЦїНгЪмаХЯЂВЂДІРэдЫЖЏЁЂЙЄзїЁЂжДааУќСюЯрЙиЖЏЬЌаХЯЂМАЪБжИЛгеЊЙћЛњВЩеЊЦЛЙћЁЃ
2.2 еЊЙћЛњЕФЙЄзїдРэ
ећЬхНсЙЙАќРЈСНздгЩЖШЕФвЦЖЏдиЬхКЭШ§здгЩЖШДјМаГжЦїЕФЛњаЕБлЁЃеЊЙћЛњжїЬхЪЙгУЭјПзТСАхВФСЯКЭЙЄГЬЫмСЯзщзАГЩеЊЙћЛњЛњЬхЃЌНсЙЙЧсЧЩЃЌЗНБудкГЕЬхЩЯдіМгФЃПщЁЃ
вЦЖЏЕзХЬЃК
ЮЊСЫЪЪгІЖрБфЕФПЊЗХЪНЕФЦЛЙћдАЕиУцЛЗОГЃЌбЁгУТФДјЪНвЦЖЏаЁГЕзїЮЊвЦЖЏЕзХЬЁЃЩЯУцМгзАСЫжїПиЕчТЗАхЃЌВЩеЊИЈжњзАжУЃЌЖржжДЋИаЦїЃЌЕчдДФЃПщЕШЁЃ
ДЋЖЏНсЙЙЃК
жївЊАќРЈЛњаЕЪжбќВПЃЌДѓБлЃЌаЁБлВПЗжЁЃЦфзЊЖЏОљВЩгУНЛСїЫХЗўЕчЛњзїЮЊЧ§ЖЏдДЃЌбЁгУаааЧГнТжМѕЫйЦїЖдЕчЛњНјааМѕЫйЃЌЭЌЪБЬсИпзюжеЕФЪфГіХЄОиЁЃжБНгбЁгУЕчЖЏЭЦИЫзїЮЊаЁБлЩьЫѕЕФВПМўЃЌдкЩьГіИЫЕФФЉЖЫЭЈЙ§ТнЫПСЌНгЯргІЗЈРМХЬгыФЉЖЫжДааЦїЙЬСЌЁЃ
ФЉЖЫжДааЦїЃК
ФЉЖЫжДааЦїГѕВНбЁЖЈЪЙгУМаГжЛњЙЙНЋЙћЪЕМаНєЃЌдйРћгУМєЕЖНЋЙћБњМєЖЯЃЌетжжЗНЗЈашвЊОЋШЗЕФМьВтЙћБњЕФЮЛжУЃЌжЎКѓЭЈЙ§ОЋШЗЕїећФЉЖЫжДааЦїЕФЮЛжУКЭзЫЬЌЃЌЦфЯЕЭГЕФПижЦФбЖШЩдФбЁЃ
ЦфжївЊЭЈЙ§ЖЏСІдДЃЌЧаИюЛњЙЙЃЌНгНќЛњЙЙЃЌМаГжЛњЙЙЃЌДЋИаПижЦЯЕЭГзщГЩЁЃ
НгНќЛњЙЙЩшМЦ:
гЩЕчЖЏЛњЕФЫПИмТнФИНсЙЙЁЂЛњМмЁЂЛЌПщКЭЕМИЫЙЙГЩЁЃ
МаГжЛњЙЙЃК
ЕчЖЏЛњЕФЫПИмТнФИНсЙЙЁЂЛЌПщКЭЛњМм
ЧаИюЛњЙЙЃК
гЩЕЖМмКЭЫЋУцЕЖЦЌзщГЩЁЃ
ФП ТМ
еЊвЊ I
Abstract II
1 в§бд 1
1.1ПЮЬтЕФРДдДгыбаОПЕФФПЕФКЭвтвх 1
1.2еЊЙћЛњЕФгУЭО 2
1.3ВЩеЊЙћЛњЕФЬиЕу 2
1.4БОПЮЬтбаОПЕФФкШн 3
1.5 UGЩшМЦЛљДЁ 4
2 еЊЙћЛњЕФДДаТЩшМЦ 6
2.1еЊЙћЛњЕФзмЬхЗНАИЭМ 8
2.2еЊЙћЛњЕФЙЄзїдРэ 10
3 еЊЙћЛњВПЗжСуВПМўбЁаЭМАаЃКЫ 12
2.3.1ВПЗжЕчЛњМЦЫу 14
2.3.2СЊжсЦїЕФбЁаЭ 16
2.3.3жсГаЕФбЁаЭМЦЫу 18
4 еЊЙћЛњЕФШ§ЮЌНЈФЃ 19
4.1змЬхНсЙЙШ§ЮЌНЈФЃ 20
4.2ЕзВПТжЪНГЕШ§ЮЌНЈФЃ 20
4.3ЕчЖЏЦјИзЕФШ§ЮЌНЈФЃ 21
НсТл 22
жТаЛ 23
ВЮПМЮФЯз 24
|