6kgШ§здгЩЖШЛњаЕЪжНсЙЙЩшМЦ(КЌCADСуМўзАХфЭМ)(ШЮЮёЪщ,ТлЮФЫЕУїЪщ12000зж,CADЭМжН9еХ)
еЊ вЊ
ДЫДЮЩшМЦЕФЯюФПЕФжївЊФкШнЃКЪЧЪЙгУЛњаЕдРэЩшМЦЃЌЖдШ§ИіздгЩЖШШ§здгЩЖШЛњаЕЪжЕФЩшМЦ,ЪьЯЄШ§ИіздгЩЖШШ§здгЩЖШЛњаЕЪжЕФЪЙгУКЭЯрЙиЕФЩшМЦВНжшЁЃШ§здгЩЖШЛњаЕЪжФмЙЛДњЬцКмЖржиИДадЕФЬхСІРЭЖЏ,ДгЖјМѕЩйЙЄШЫЕФРЭЖЏЧПЖШ,ЬсИпЩњВњаЇТЪЁЃНсКЯШ§ИіздгЩЖШЕФЩшМЦЕФЫљгаЗНУцЕФжЊЪЖ,дкЩшМЦЙ§ГЬжаЛсбЇЯАШчКЮЗЂЯжЮЪЬтКЭНтОіЮЪЬтЁЃдкздМКЕФЯыЗЈКЭДДвтЕФЩшМЦ,ЬсИпЫћУЧЕФДДаТФмСІЁЃЪдЭМШУШ§здгЩЖШЛњаЕЪжЪЙгУЗНБу,НсЙЙМђЕЅЁЃ
Ш§здгЩЖШЛњаЕЪжЪЧвЛИігааЇЕФЗНЗЈРДЬсИпВњЦЗжЪСПКЭРЭЖЏЩњВњТЪ,ЪЕЯжЩњВњЙ§ГЬЕФздЖЏЛЏ,ИФЩЦЙЄзїЛЗОГ,НЕЕЭРЭЖЏЧПЖШЁЃБОЪЕгУаТаЭЩцМАвЛжжздЖЏЩшБИгУгкФЃЗТШЫЬхЕФЩЯВПЕФЙІФмКЭжДааВйзїЕФЙЄМўЛђЙЄОпвРОндЄЯШШЗЖЈЕФашЧѓЁЃШ§здгЩЖШЛњаЕЪжФмЙЛДњЬцЪжЙЄРЭЖЏ,ДѓДѓНЕЕЭЙЄШЫЕФРЭЖЏЧПЖШ,ИФЩЦЙЄзїЛЗОГ,ЬсИпРЭЖЏЩњВњТЪКЭЩњВњздЖЏЛЏЫЎЦНЁЃдкжиЙЄвЕЩњВњжаГЃГЃЦЕЗБКЭИпаЇЕФЪЙгУШ§здгЩЖШЛњаЕЪжЁЃДЫЭт,ЫќФмдкИпЮТЁЂЕЭЮТЁЂЩюЫЎЁЂИпбЙЁЂЗХЩфадКЭЦфЫћгаЖОЕФЛЗОГЮлШОзДПі,ЕЋвВЯдЪОЦфгХЪЦ,ЗЂеЙЧАОАЙуРЋЁЃШ§здгЩЖШЛњаЕЪжЪЧЛњаЕММЪѕКЭЕчзгММЪѕЯрНсКЯЕФИпПЦММВњЦЗЁЃ
ЙиМќДЪЃКШ§здгЩЖШЛњаЕЪжЁЂШ§здгЩЖШЁЂЛњаЕдРэ
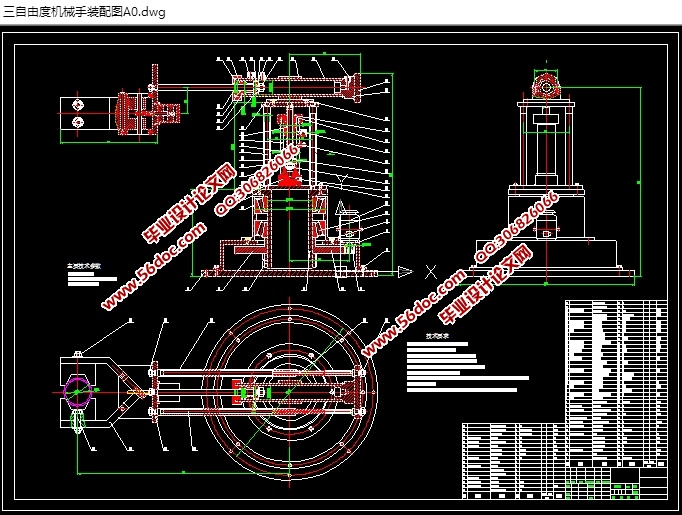
БОДЮЩшМЦЕФШ§здгЩЖШЛњаЕЪжжївЊгУРДзЅШЁАсдЫЩњВњЯпЕФВњЦЗМўЃЌЛљБОвЊЧѓЃКШ§здгЩЖШЛњаЕЪжЕФНсЙЙвЊНєДеМђЕЅ,ОЋЖШвЊЧѓИп,ЬхЛ§аЁВЛеМПеМфЁЃвРОнЩЯЫпЕФЫФжжНсЙЙаЮЪНЃЌетДЮЩшМЦЮвУЧВЩгУдВжљзјБъЕФНсЙЙаЮЪНЃЌДЫРрЛњЙЙБШНЯЗћКЯЮвУЧЕФЩшМЦвЊЧѓЁЃЭМ2-2ЪЧШ§здгЩЖШЛњаЕЪжЙЄзїЕФЪОвтЭМЁЃЯТЭМжаШ§здгЩЖШЛњаЕЪжЕФЙЄзїОЭЪЧНЋЪфЫЭДјЩЯЕФСуМўАсзЅШЁВЂдЫЕНСэЭтвЛЬѕЪфЫЭДјЩЯУцЁЃ
2.1.3ЙцИёВЮЪ§
зЅШЁжиСПЃК6 kg
здгЩЖШЪ§СПЃК3
ЛњЙЙаЮЪНЃКдВжљзјБъНсЙЙ
ФП ТМ
еЊ вЊ II
Abstract III
ФП ТМ IV
Ек1еТ аї Тл 1
1.1Ш§здгЩЖШЛњаЕЪжЕФгХЕу 1
1.2Ш§здгЩЖШЛњаЕЪжЕФзщГЩ 2
1.3 БОДЮЩшМЦЕФжївЊФкШн 2
Ек2еТ Ш§здгЩЖШЛњаЕЪжЛњЙЙзмЬхЗНАИЩшМЦ 4
2.1Ш§здгЩЖШЛњаЕЪжЕФЩшМЦвЊЧѓ 4
2.2 Ш§здгЩЖШЛњаЕЪжВФСЯЕФбЁдё 7
2.3ЛњаЕБлЕФдЫЖЏаЮЪН 8
2.4Ш§здгЩЖШЛњаЕЪжЕФЧ§ЖЏВПМў 9
Ек3еТ ЛњаЕЪжжївЊВПЗжЩшМЦ 10
3.1 зІВПЕФЩшМЦ 10
3.1.1 ЪжВПНсЙЙЩшМЦМАВЮЪ§МЦЫу 10
3.1.2 ЭѓВПНсЙЙЩшМЦМАМЦЫу 13
3.1.3 ЪжБлЩьЫѕЕФЩшМЦгыМЦЫу 15
3.2 вКбЙЧ§ЖЏЯЕЭГЩшМЦ 17
3.3 ЛњЩэНсЙЙЕФЩшМЦ 18
3.3.1 ЕчЛњЕФбЁдё 19
3.3.2 МѕЫйЦїЕФбЁдё 19
3.3.3 ТнжљЕФЩшМЦгыаЃКЫ 20
3.3.4 ЛњзљЕФЛњаЕНсЙЙЪОвтЭМ 21
змНс 23
ВЮПМЮФЯз 23
жТ аЛ 25
|
