工业机器人自动焊接机械手设计及应用(含CAD装配图,PLC控制系统图)
来源:56doc.com 资料编号:5D21834 资料等级:★★★★★ %E8%B5%84%E6%96%99%E7%BC%96%E5%8F%B7%EF%BC%9A5D21834
资料以网页介绍的为准,下载后不会有水印.资料仅供学习参考之用. 密 保 惠 帮助
资料介绍
工业机器人自动焊接机械手设计及应用(含CAD装配图,PLC控制系统图)(论文说明书9000字,CAD图10张,答辩PPT)
摘要
由于焊接工作的需要,人们经常遭受腐蚀、高温及有毒气体等因素的危害,不仅工人的劳动强度大,而且危及生命,因此焊接机械手孕育而生。它代替工人自动化完成各种焊接任务,一方面使工人的劳动条件得到改善,另一方面,焊接机械手焊接质量稳定且大大提高劳动生产率。所以焊接机械手的应用及发展前景巨大。
本论文主要首先对焊接机械手尤其是砂箱焊接进行深入分析,明确焊接机械手的研究含义和焊接要求,把握其结构特色和常见的焊接机械手结形态。提出了工业焊接机械手的研究计划,并为砂箱焊接机械手的研究做了相应的常识预备和技能储备。其次,选用了当今主流的CAD设计设计软件对焊接机械手的首要部件进行了结构与简单设计。最后根据焊接出来机械手的外面形状特色和大小的要求,拿出工业方面的机械手经常运用的传动方向,最后确定了产品的传动组织结构和电动控制系统,并且挑选合适的控制单元来完成焊接机械手控制系统设计。
关键词:焊接机械手;结构设计;CAD制图;控制系统
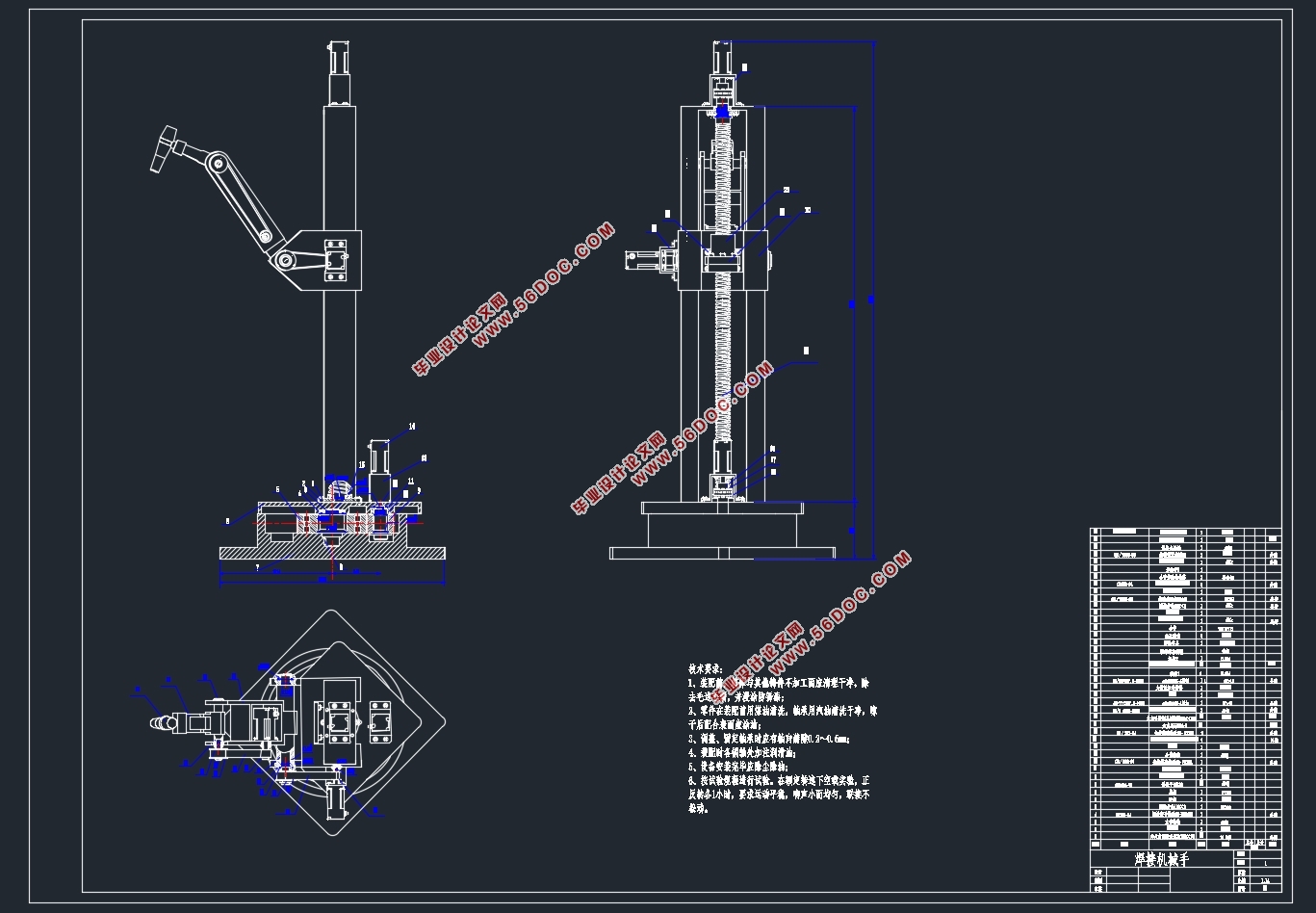
该焊接机械手用于砂箱的焊接焊接,采用条焊的焊接方式。焊接机械手固定在砂箱底板上,实现由上而下、由左及右和两者自由组合的焊接动作。要求工作范围大,焊枪可以灵活转动,焊接路径多样,结构紧凑,适用于箱体外部的焊接。
(1)基本工作要求:
能够在较长时间进行焊接操作后机械手本身不发生显著形变。
(2)运动要求:
焊接机械手可以由左及右、由上而下并且两种方向自由组合进行焊接,产生的焊接路径多样。
(3)刚性要求:
手臂的刚性对手臂焊接工件时动作的平稳性会产生直接影响,也会影响到运动的速度和定位的精度。如果刚性差则会引起手臂的形变,手臂产生振动,使焊接路径比预期路径发生不可避免的偏差,为此必须保证手臂具有足够的刚度。
目录
工业机器人自动焊接系统设计及应用 2
摘要 2
ABSTRACT 3
目录 4
1绪论 6
1.1机械手简介 6
1.2机械手的简史 7
1.3机械手的发展趋势 8
1.4本章小结 9
2 焊接机械手的总体方案设计 10
2.1方案设计 10
2.2方案分析 10
2.3方案确定 13
2.4焊接机械手方案的确定 13
2.5传动机构设计与分析 16
2.5.1腰部传动机构 16
2.5.2大臂传动机构 16
2.5.3小臂及焊枪夹具传动机构 17
3执行机构的设计与分析 19
3.1腰部 19
3.2大臂 20
3.3小臂 21
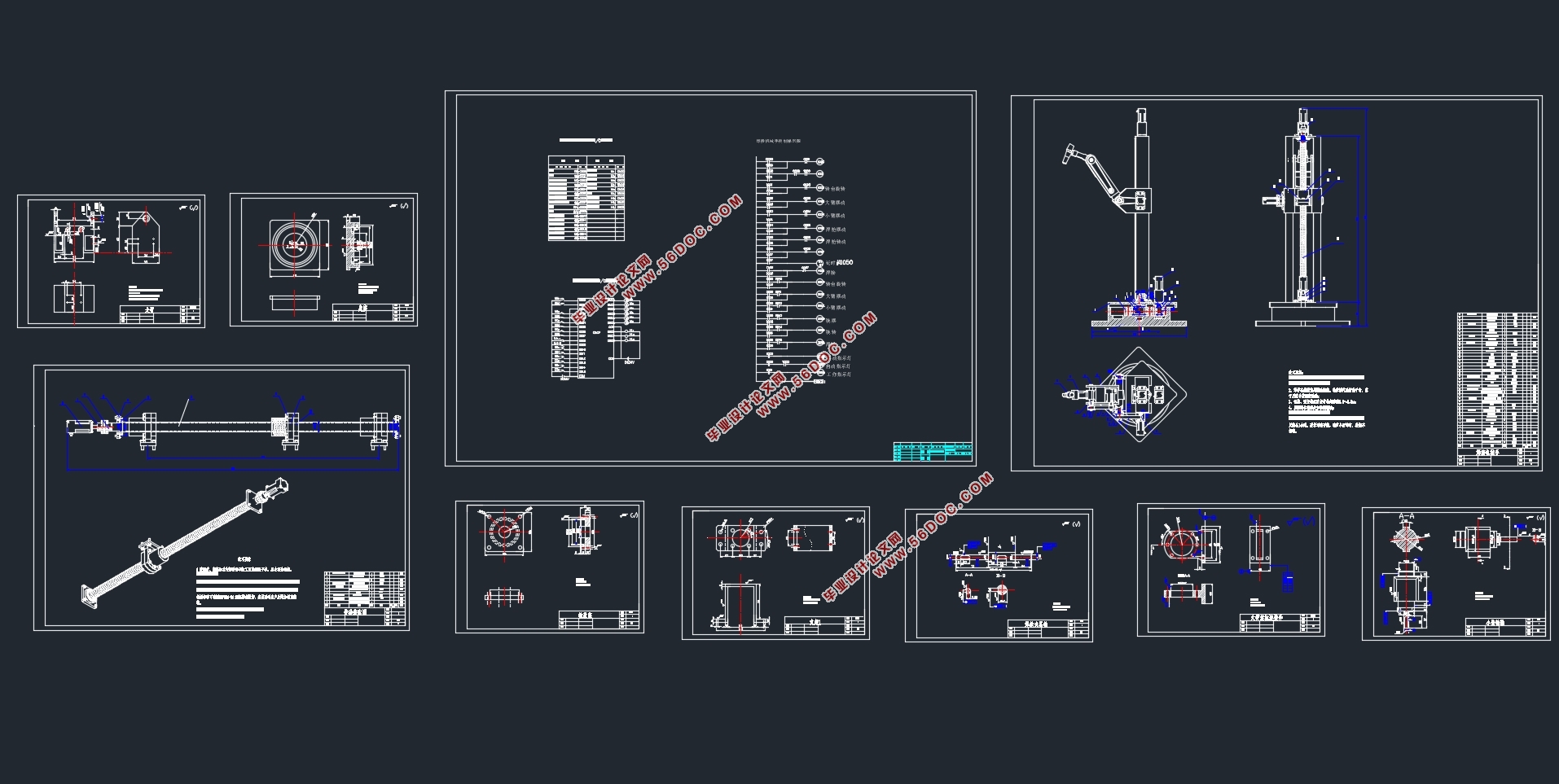
4整体设计方案示意图 22
5自动焊接系统设计 23
5.1硬件系统组成 23
5.2软件系统的设计 24
5.2.1控制系统的控制流程 24
5.3 PLC的应用 26
5.3.1用功能表图表示控制过程 27
5.3.2 I/O分配表与配线图 28
5.3.4写出梯形图 30
总结 31
参考文献 32
致谢 33
|
