六自由度气动搬运机械手及其控制系统设计(含CAD梯形图装配图)(论文说明书25000字,外文翻译,CAD图5张)
摘 要
在当今大规模制造业中,企业为提高生产效率,保障产品质量,普遍重视生产过程的自动化程度,机械手作为自动化生产线上的重要成员,逐渐被企业所认同并采用。机械手的技术水平和应用程度在一定程度上反映了一个国家工业自动化的水平,目前,机械手主要承担着焊接、喷涂、搬运以及堆垛等重复性并且劳动强度极大的工作,工作方式一般采取示教再现的方式。
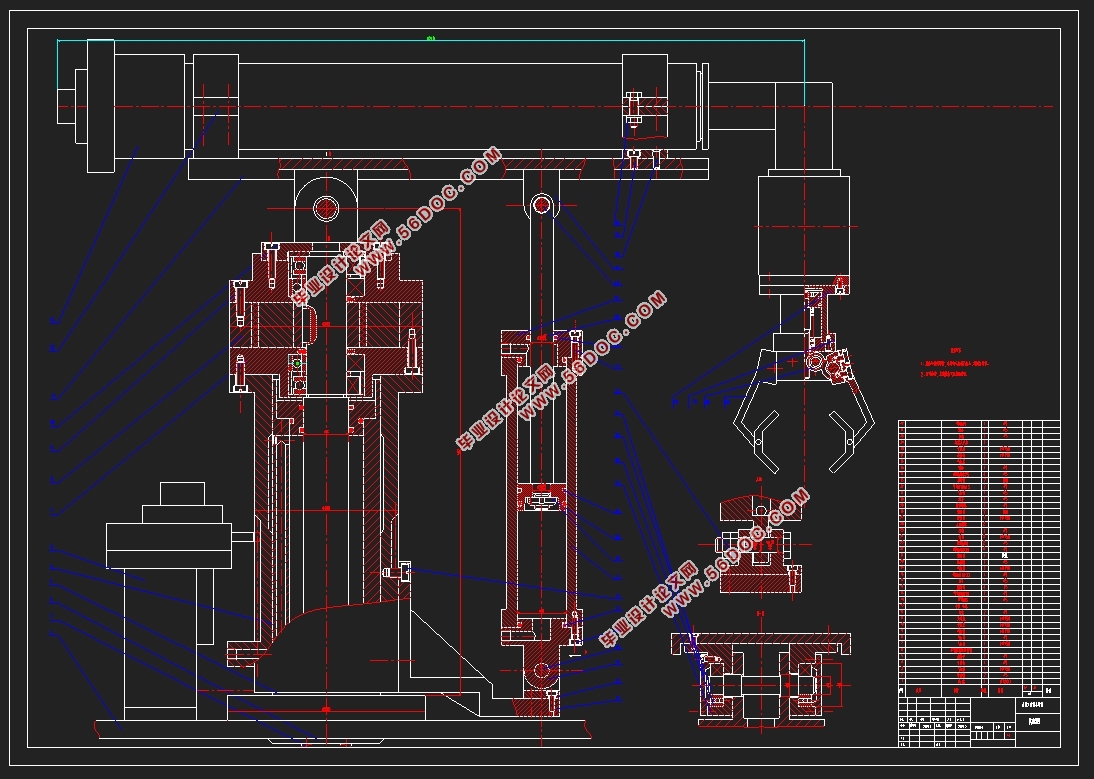
本文将设计一台六自由度的机械手,主要的功用就是自动搬运。首先,本文将设计机器人的底座、大臂、小臂和机械手的结构,电路图的设计与绘制,控制系统的程序编写三个方面入手,并分别给予详细的介绍,从而让在校大学生或机器人爱好者能以此为基础,从而自己动手,一步步的从机械手的结构设计与制作,电路图的设计与绘制,控制系统的程序编写,来设计自己的机械手,从而为以后更深层次的研究打下基础。
关键词:机械手;搬运;六自由度;PLC
Design of six.degree.of.freedom pneumatic conveying manipulator and its control system
ABSTRACT
In today's large-scale manufacturing industry, in order to improve production efficiency and ensure product quality, enterprises generally pay attention to the degree of automation in the production process. As an important member of the automatic production line, manipulator is gradually recognized and adopted by enterprises. The technical level of the manipulator and the degree of application reflect the level of industrial automation of a country to some extent. At present, the manipulator is mainly responsible for welding, spraying, handling, stacking and other repetitive and labor-intensive work. The working mode generally adopts the mode of teaching reproduction.
This paper will design a six degree of freedom manipulator, the main function is automatic handling. First of all, in this paper, the design of the robot base, arm, forearm, and the structure of the manipulator, the design of the circuit diagram and the drawing, programming of the control system of three aspects, and gives detailed introduction respectively, so as to make college students or robot enthusiasts can on this basis, to myself, step by step from the structure design and manufacture of mechanical hand, the design of the circuit diagram and the drawing, the programming of the control system, to design your own manipulator, so as to lay a foundation for further deeper research.Key words: manipulator; Handling; Six degrees of freedom; PLC

目 录
1 引言 1
1.1 课题的背景和意义 1
1.2 机械手的分类 1
1.3 气动机械手的组成 4
1.4 应用机械手的意义 7
1.5 机械手的现状 7
1.6 工业搬运机械手在生产中的应用 9
1.6.1 建造旋转零件(转轴、盘类、环类)自动线 10
1.6.2 在实现单机自动化方面 10
1.6.3 锻、铸、焊热处理等热加工方面 10
1.7 机械手的组成 11
1.7.1 执行机构 11
1.7.2 驱动机构 12
1.7.3 控制系统分类 12
1.8 课题工作要求 12
1.8.1 用途 12
1.8.2 规格参数 12
2 机械手的结构的设计 13
2.1 手部机构 13
2.1.1 手部设计基本要求 13
2.1.2 典型的手部结构 13
2.1.3 机械手抓的设计计算 14
2.1.4 机械手手抓夹持精度的分析计算 16
2.1.5 弹簧的设计计算 21
2.2 系统组成 22
2.3 总技术方案 22
2.4 腕部结构的设计 24
2.4.1 腕部设计的基本要求 24
2.4.2 腕部的结构以及选择 24
2.4.3 腕部的设计计算 25
2.5 臂部 29
2.5.1 臂部的结构形式 29
2.5.2 臂部运动的导向装置 30
2.6 机械手机身的设计计算 32
2.6.1 机身的整体设计 32
2.6.2 机身回转机构的设计计算 34
2.6.3 机身升降机构的计算 37
2.6.4 轴承的选择分析 40
3 气动系统设计 41
3.1 启动系统设计的主要内容及设计程序 41
3.1.1 明确工作要求 41
3.1.2 设计气动回路 41
3.1.3 选择执行元件 41
3.1.4 选择控制元件 41
3.1.5 选择气动辅件 41
3.1.6 压力损失的验算 42
3.1.7 选择空气压缩机 42
3.2 气压传动系统原理图 42
4. 气动机械手控制系统的设计 44
4.1 结构和功能介绍 44
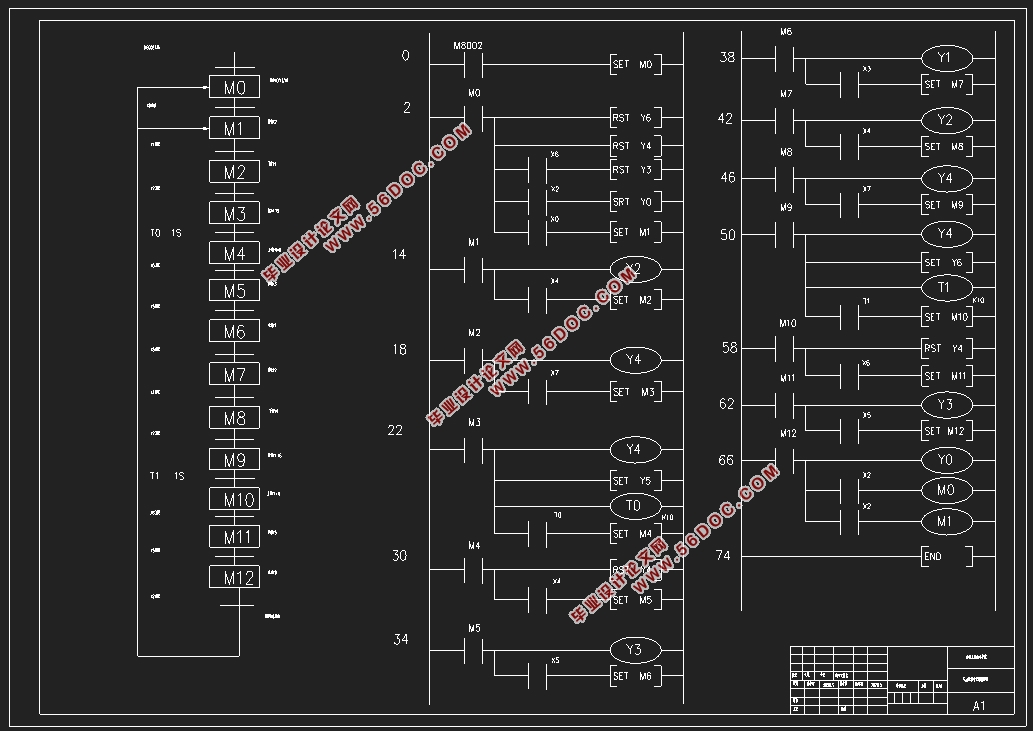
4.2 PLC控制系统的设计 46
4.2.1 PLC I/O表和I/O接线图 46
4.2.2 控制程序设计 46
5 机械臂的控制方式 47
5.2 控制要求 48
5.2.1 手动工作方式 48
5.2.2 单动工作方式 48
5.2.3 自动工作方式 48
5.3 启动机械手的工作流程 48
参考文献 52
附录 54
外文翻译 59
中文译文 70
致谢 78
|