转向自动操作系统调试台架设计(含CAD零件图装配图,CATIA三维图)(任务书,开题报告,文献摘要,外文翻译,论文说明书13000字,CAD图5张,CATIA三维图)
摘要
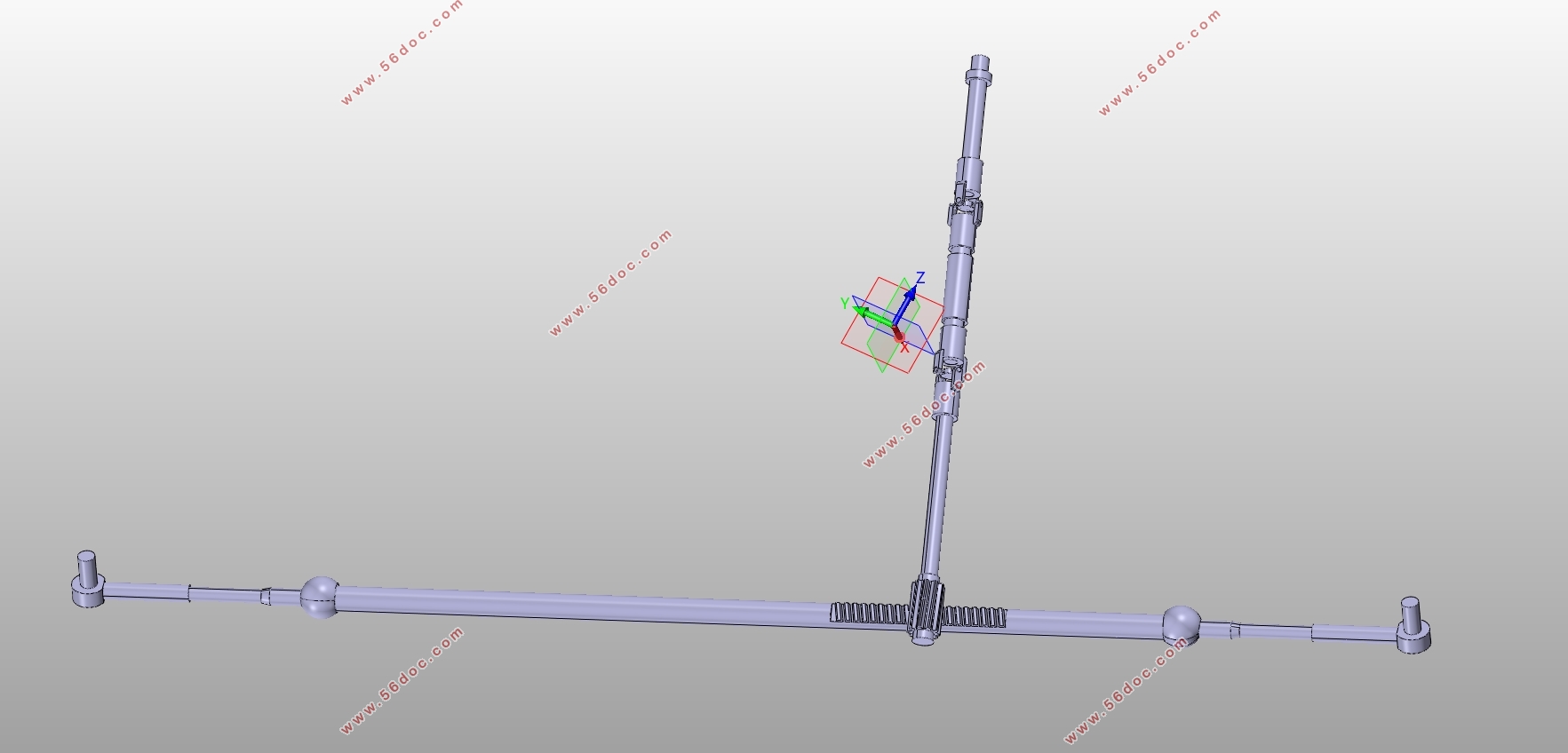
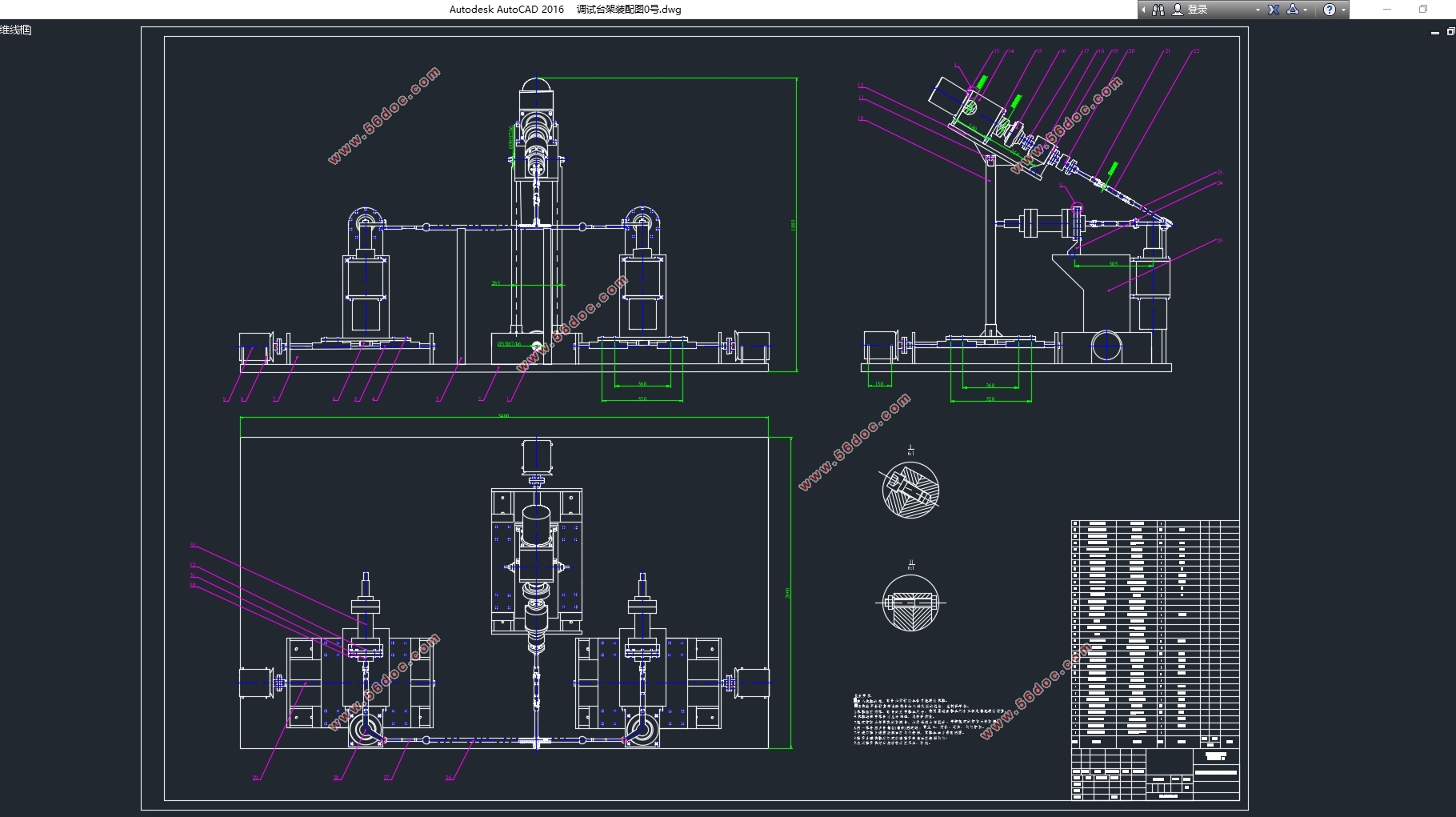
随着汽车产业的飞速发展,转向系统的性能对整车的安全性和可靠性起到了越来越重要的作用。而台架试验具有效率高、成本低、不受环境影响等优点,已经成为转向系统的调试必不可少的环节。本文从调试台架研究的目的及意义出发,阐述了国内外的研究现状,明确了研究的基本内容。根据汽车行业标准和台架试验标准,确定了调试台架的调试规范,采用五轴加载的布局方案和伺服液压缸加载的阻力模拟方案。通过介绍调试台架的总体结构和工作原理,利用Catia软件建立了三维模型,利用Ansys软件分析了固定支架和导轨滑块的结构强度。在计算出伺服电动机的额定功率、额定转矩等参数,并且校核了滚珠丝杠轴承的寿命之后,选择了系统的主要部件和传感器的型号。
关键词:转向系统;调试台架;加载装置;伺服电动机;传感器
Abstract
With the rapid development of the automotive industry, the performance of the steering system has played an increasingly important role in the safety and reliability of the vehicle. The bench test has the advantages of high efficiency, low cost, and no environmental impact, and has become an indispensable link in the commissioning of the steering system. In this paper, starting from the purpose and significance of the study of the debugging bench, the research status at home and abroad is described and the basic content of the research is clarified. According to the automotive industry standards and bench test standards, commissioning specifications for the commissioning gantry were determined, and a five-axis loading layout scheme and a drag simulation scheme for hydraulic servo cylinder loading were adopted. By introducing the overall structure and working principle of the debugging gantry, a three-dimensional model was established using Catia software, and the structural strength of the fixed bracket and rail slider was analyzed using Ansys software. After calculating parameters such as rated power and rated torque of the servo motor and checking the life of the ball screw bearing, the main components and sensors of the system were selected.
Keywords: steering system; debugging bench; loading device; servo motor; sensor
本文通过设计、计算和选择,确立了调试台架的三维模型,分析了传动机构的力学和运动学特性,计算了电动机参数和轴承寿命,采用有限元法对承载支架的结构进行了分析,选择了主要器件和传感器的具体型号,具体内容如下:
确定转向自动操作系统调试台架的调试规范;
确定转向自动操作系统调试台架的设计方案;
进行转向自动操作系统调试台架的结构设计;
进行转向自动操作系统调试台架的设计计算;
进行转向自动操作系统调试台架的器件选型。
2.1调试规范
该调试台架适用于不同型号的转向系统,在进行调试台架的设计之前,必须对其具体的功能要求和技术要求仔细地分析。
2.1.1功能要求
该调试台架的具体功能要求如下:
1. 调试台架应易于安装和拆卸,能够根据各种不同类型的转向系统,调节转向盘模拟装置和阻力模拟装置,以进行自动操作并完成测试;
2. 在行驶过程中,汽车转向系统的阻力条件应尽可能真实地模拟,包括道路对车轮的转向阻力、驾驶员传递给转向盘的扭矩以及道路不平引起轮胎的不规则性所生成的激励[11];
3. 必须尽可能对各种试验数据进行准确地测量、检测和分析,并且遇到故障时能够自动报警和对操作人员的安全保护;
4. 调试台架应能实现操作的人性化,操作者可以输入转向系统的各项参数并设置所需的试验数值。
该调试台架的技术性能要求如下:
1. 调试台架采取五轴加载:输入端为第一轴加载,左右转向节臂分别包含水平和垂直方向的两轴加载;
2. 转向系统齿条位移:范围±100mm;
3. 直流电动机各项参数:额定电流2.8A,额定功率0.4kW;
4. 模拟转向盘输入端的转速传感器:量程±100N•m,精度0.5%FS;
5. 模拟转向盘输入端的角度传感器:量程±720°,分辨率0.1度;
6. 模拟转向盘输入端支架调整范围:500mm;
7. 模拟路面阻力水平输出端的载荷:量程±30kN,精度1%FS;
8. 模拟路面阻力水平输出端的位移:范围±80mm,精度1%FS;
9. 模拟轮胎上下跳动的激励位移:范围±50mm,精度1%FS;
10. 模拟轮胎上下跳动的激励频率:范围0.01Hz ~100Hz,分辨率0.01Hz;
11. 调试台架的支架以及导轨滑块等部件的强度:抗拉强度σb=150MPa,抗压强度σc=650MPa;
12. 各个加载装置能够单独工作,具有独立的信号输入输出端口,并且同时工作时不产生冲突。
目录
第一章绪论 1
1.1 引言 1
1.2 研究的目的及意义 1
1.3 国内外研究现状 1
1.3.1 国内研究现状 1
1.3.2 国外研究现状 2
1.4 研究的基本内容 2
1.5 本章小结 3
第二章转向自动操作系统调试台架总体设计 4
2.1 调试规范 4
2.1.1 功能要求 4
2.1.2 技术要求 4
2.2 测试项目 5
2.3 加载轴数方案 5
2.4 阻力模拟方案 6
2.5 本章小结 7
第三章转向自动操作系统调试台架结构设计与计算 8
3.1 调试台架的布置 8
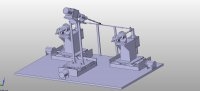
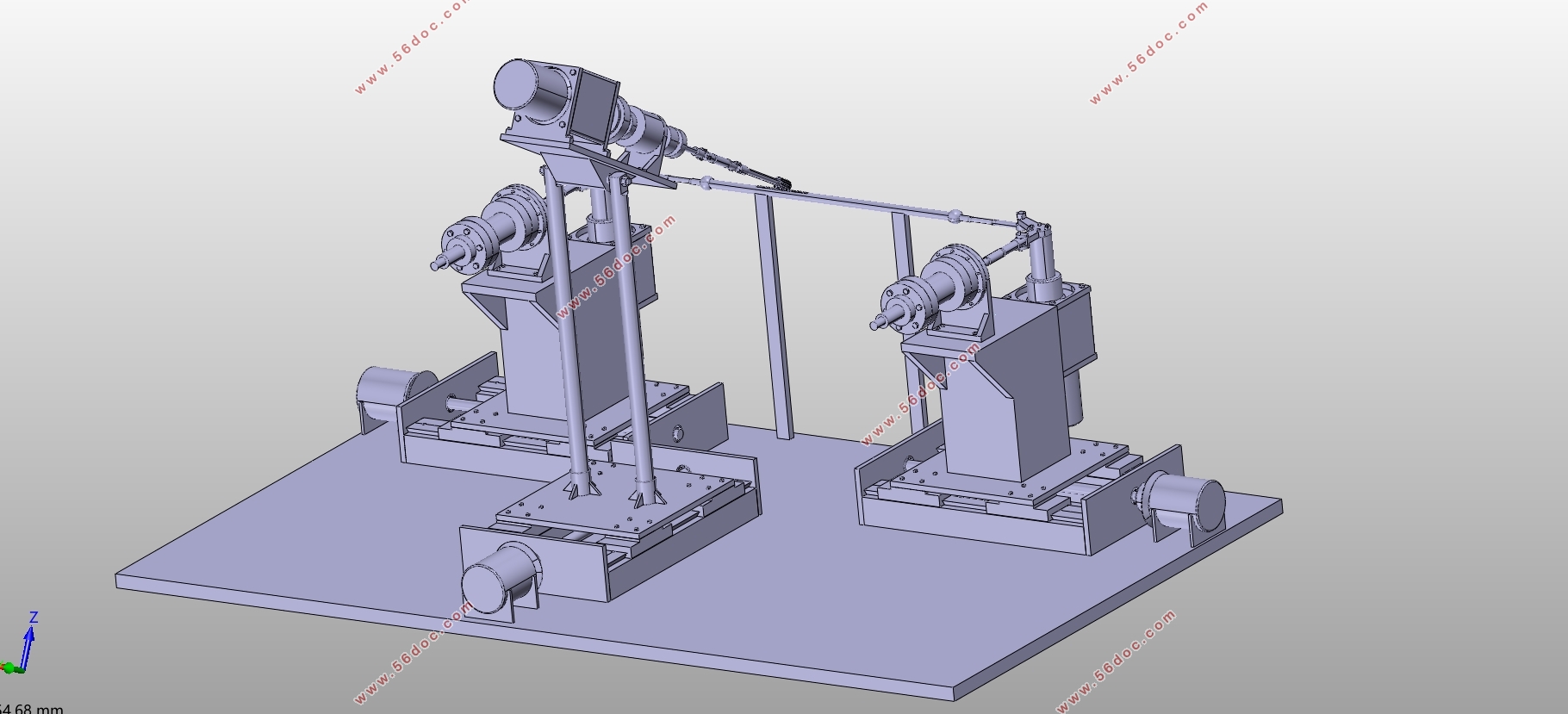
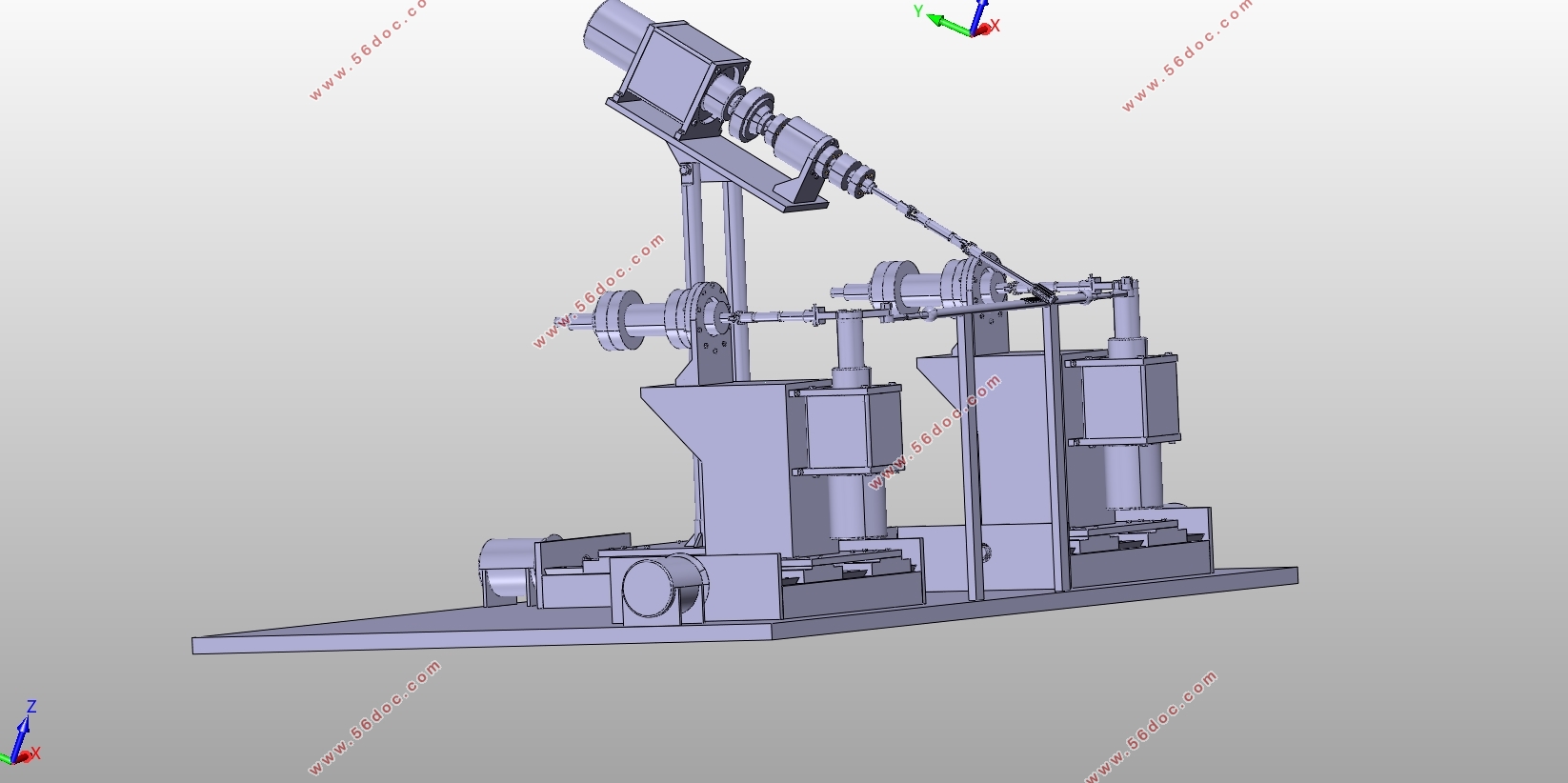
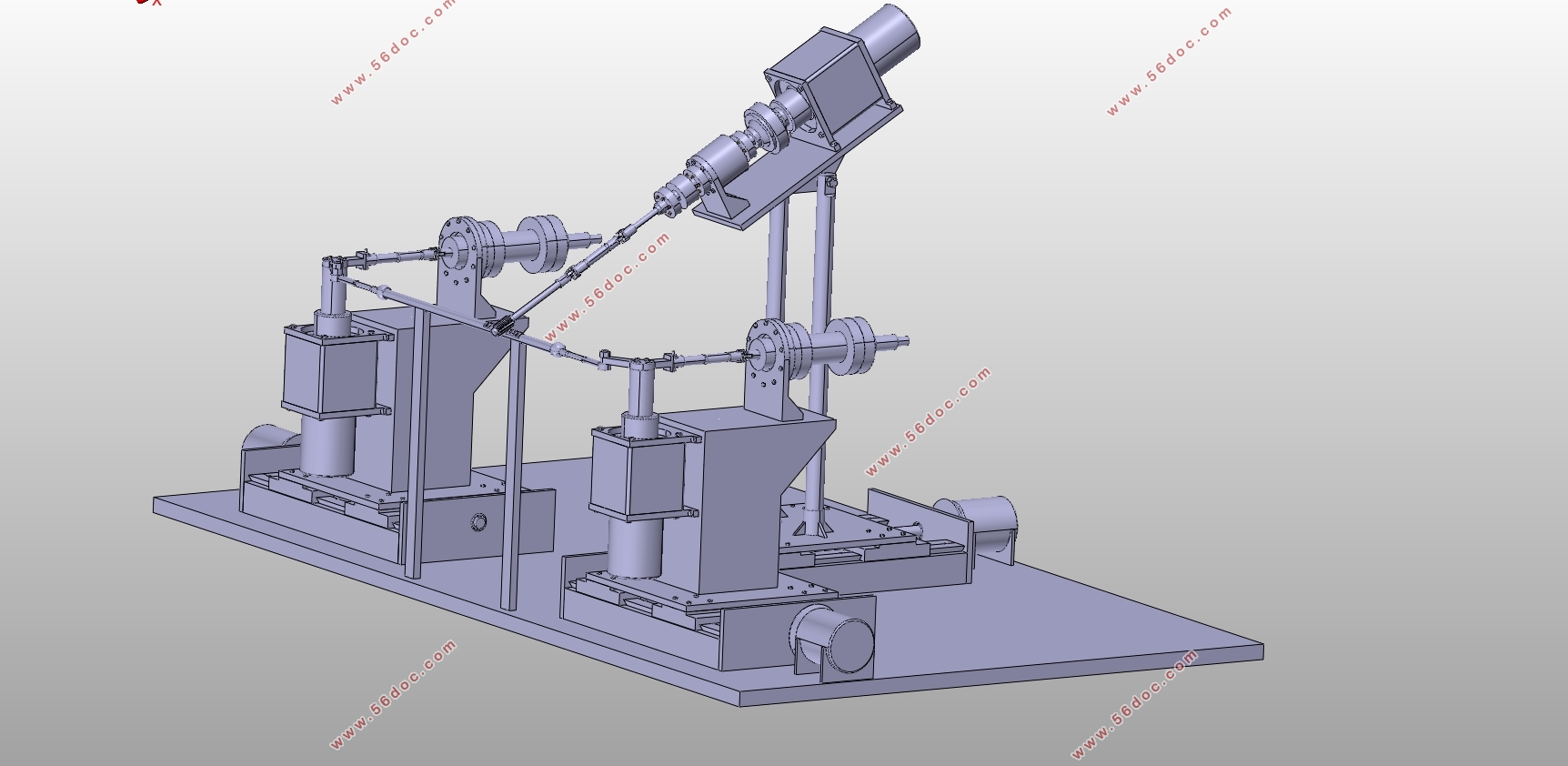
3.1.1 总体结构 8
3.1.2 基本原理 8
3.2 加载装置 9
3.2.1 输入端加载装置 9
3.2.2 输出端双向加载装置 9
3.3 自动调整装置 10
3.4 传动机构的理论分析 10
3.4.1 静力学特性 10
3.4.2 运动学特性 12
3.5 伺服电机参数计算 13
3.6 滚珠丝杠轴承寿命计算 14
3.7 承载部件的结构强度分析 14
3.7.1 输入端加载装置支架 15
3.7.2 输出端加载装置支架 16
3.7.3 自动调整装置导轨滑块 16
3.8 本章小结 17
第四章转向自动操作系统调试台架器件选型 18
4.1 电子控制单元(ECU) 18
4.2 伺服电动机 18
4.2.1 输入端伺服电机 18
4.2.2 输出端伺服电机 19
4.3 减速机构 19
4.4 电磁离合器 20
4.5 传感器 20
4.5.1 转矩传感器 21
4.5.2 转速传感器 21
4.4.3 力传感器 22
4.6 本章小结 22
第五章结论与展望 24
5.1 结论 24
5.2 展望 24
参考文献 25
致谢 26
|