四足机器狗的机构设计与运动分析(含CAD零件图装配图)(任务书,开题报告,论文说明书22000字,CAD图6张)
摘要
本文主要以生物狗为仿生对象,设计一个拟犬的四足机器狗,重点在于对四足机器狗的腿部设计与脊柱设计,尤其在脊柱部分,引入了‘变刚度’的概念,让机器狗在生物学上更加接近于生物狗,并对这种四足机器狗的运动特性作出简要的计算与分析。
地球路面多为崎岖不平的地面,因此,一种类似于生物狗的四足机器狗能够适应各种不平地面与恶劣环境。本文的主要内容包括:
简要分析国内外四足机器人的发展现状和趋势
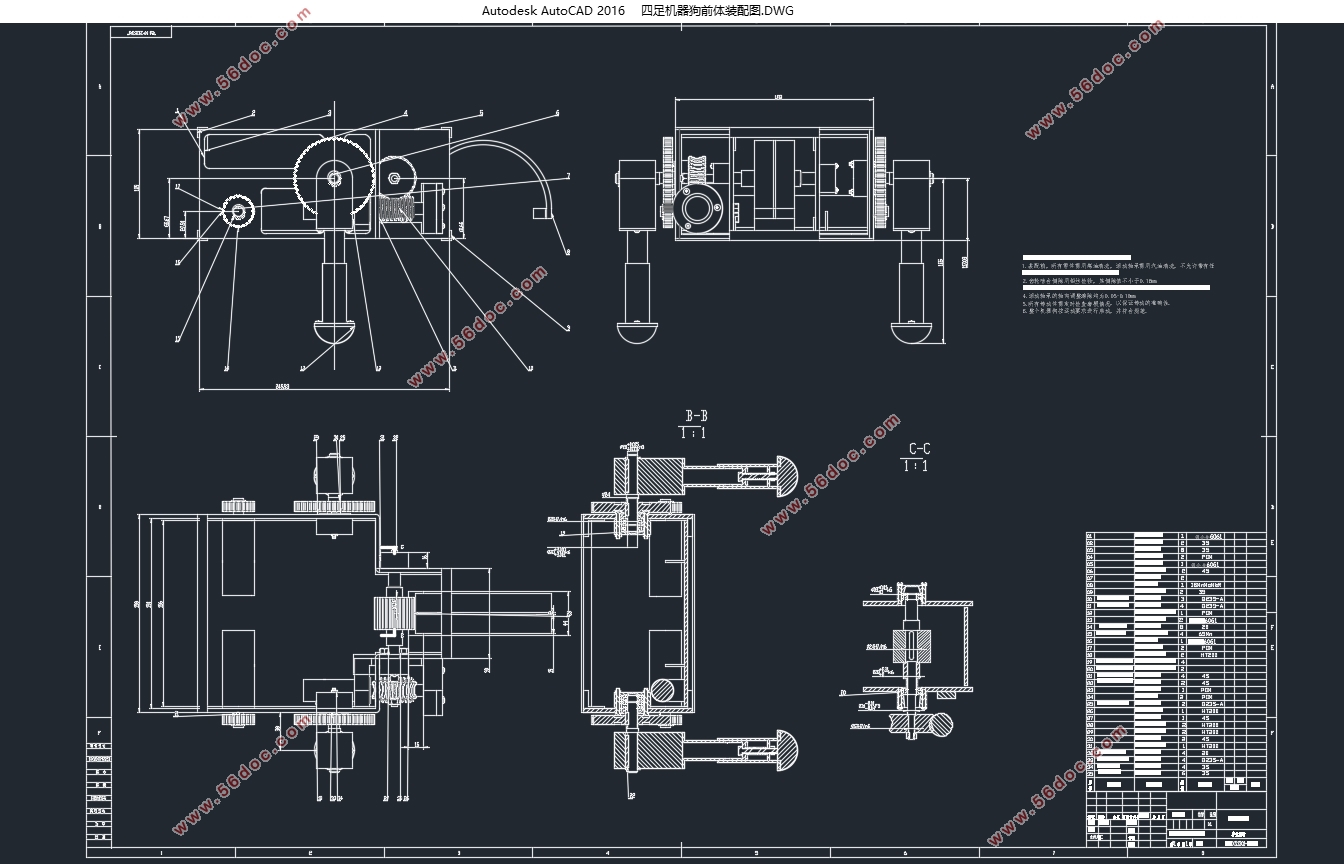
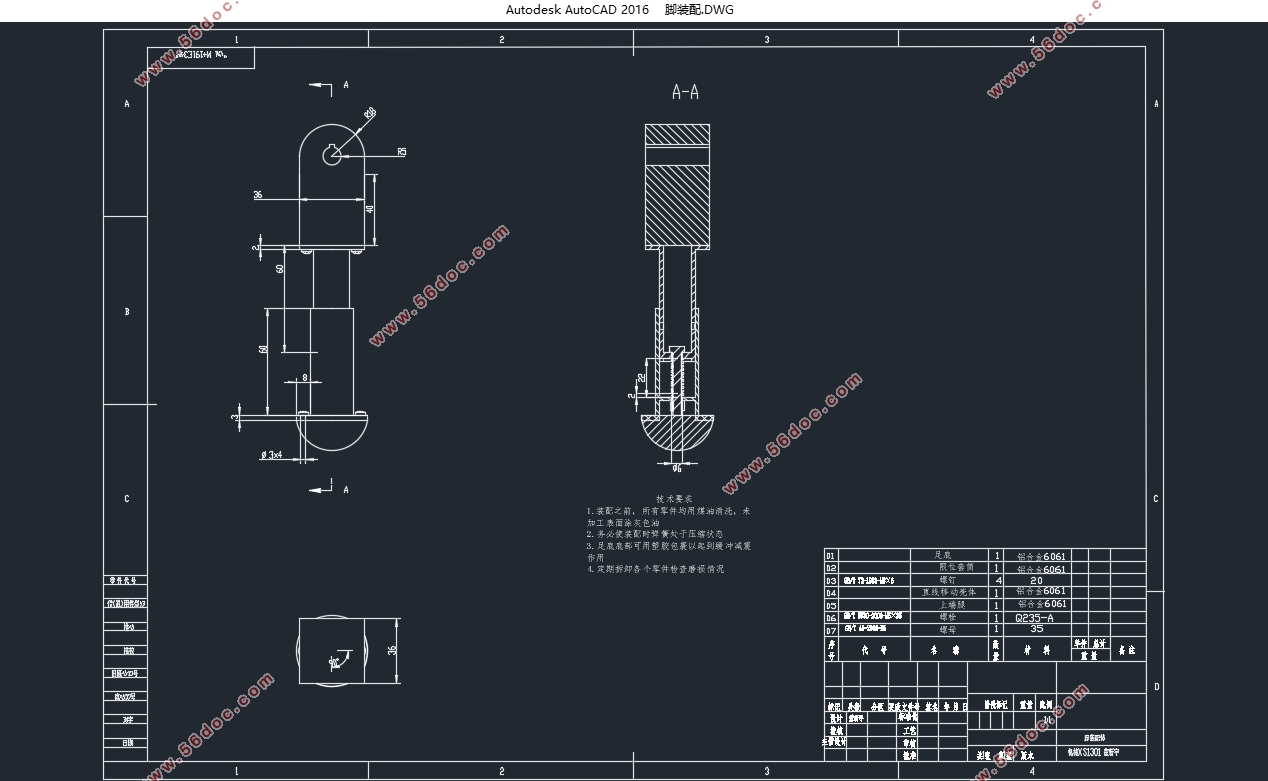
根据设想的功能要求给出四足机器狗的脊柱部分结构与腿部结构
采用三维造型软件solidworks建立四足机器狗的本体结构,然后在模型中突出之前设计的内容
根据solidworks simulation2014和solidworks motion对所设计的四足机器狗结构进行简单的静力学,动力学分析。
关键词:四足机器狗 solidworks 机械设计 运动仿真
Abstract
This article mainly to biological dog for bionic object, design a quadruped robot dog dog, the emphasis is on of the quadruped robot dog leg and spine design, especially in the part of the spine, introduced the concept of 'variable stiffness, and let the robot dog in biology is more close to the dog, and the motion characteristics of the quadruped robot dog made a brief calculation and analysis.
The earth surface is rugged ground more, as a result, a quadruped robot dog similar to the biological dog can adapt to all kinds of uneven ground and bad environment, have the characteristics of flexible movement and good adaptability to terrain, it is based on this, the bionic quadruped robot dog study to become one of hotspots in the field of robotics research. The main content of this article is
1.This paper briefly analyzes the development status and trend of the four-legged robots at home and abroad
2.According to the function of the hypothesis, the structure of the spine of the four-legged robot dog and the structure of the legs
3.Using solidworks, a 3d modeling software, the body structure of a four-legged robot dog is developed, and the design is then highlighted in the model
4.According to solidworks simulation2014 and solidworks motion, the design of the four-legged robot dog structure is simple statics, dynamic analysis and motion simulation
Key words:four-legged robot dog solidworks mechanical design motion simulation

目录
第一章 绪论 1
1.1设计任务与要求 1
1.2国内外研究现状 3
1.2.1国外机器人技术的发展现状 3
1.2.2国外机器人技术的特色和趋势 3
1.2.3国内机器人技术的发展现状 4
1.2.4我国机器人技术正面临的挑战和未来的机遇 4
1.3生物狗的生理结构与运动特性 5
1.3.1.生物狗的骨骼 5
1.3.2生物狗的运动特性 5
1.4设计的主要内容与思路 6
第二章 四足机器狗的设计方案选择 7
2.1四足机器狗结构设计方案 7
2.2前体与后体的结构设计方案 8
第三章 四足机器狗的结构设计 9
3.1前体与后体的结构设计 9
3.1.1侧向板 10
3.1.2底座 11
3.1.3角钢架 11
3.1.4连接件 11
3.2脊柱的结构设计 12
3.2.1脊柱的基本结构 12
3.2.2脊柱材料的选择 13
3.2.3变刚度的基本概念 15
3.2.4变刚度概念在脊柱中的应用 15
3.3涡轮蜗杆的选型 18
3.4齿轮齿条的选型 22
3.5传动轴的设计 24
3.5.1轴材料的选择 25
3.5.2轴径的初步估算 25
3.5.3轴的结构设计与工艺性 26
3.5.4轴的强度与刚度校核 27
3.6.1腿部结构的初次设计 28
3.6.2腿部结构的最终设计 30
3.6.3腿部与前后体的连接 31
3.6.4带动单腿的电机选型 32
3.7同步带轮的选型 32
3.8腿部轴的结构设计 37
第四章 四足机器狗三维模型的建立 39
4.1.Solidworks软件介绍 39
4.2四足机器狗本体的三维模型 39
第五章 四足机器狗结构特性与运动特性 43
5.1传动轴的有限元分析 43
5.2.腿部轴的有限元分析 46
5.3脊柱的有限元分析 48
5.4单腿的运动特性 50
第六章 结果与展望 52
6.1 成果展示 52
6.2.设计中存在的问题 52
参考文献 54
致 谢 55
|
