缝纫机针抛光自动线机械手设计(含CAD图)
来源:56doc.com 资料编号:5D25489 资料等级:★★★★★ %E8%B5%84%E6%96%99%E7%BC%96%E5%8F%B7%EF%BC%9A5D25489
资料以网页介绍的为准,下载后不会有水印.资料仅供学习参考之用. 密 保 惠 帮助
资料介绍
缝纫机针抛光自动线机械手设计(含CAD图)(任务书,开题报告,论文说明书15000字,CAD图1张)
摘 要
工业机械手近年在工业领域发展得越来越快,应用范围也越来越广。将工业机械手应用于自动化生产线将极大地提高生产效率。随着工业机器人应用范围的扩大,人们对机器人的研究不断深入。为了满足自动化生产线的要求,对已有的工业机器人进行新技术的应用、新的改进也成为了机器人研究的一个大方向。新的改进将会使工业机器人拥有更完善的性能。工业机械手近年在工业领域发展得越来越快,应用范围也越来越广。将工业机械手应用于自动化生产线将极大地提高生产效率。随着工业机器人应用范围的扩大,人们对机器人的研究不断深入。为了满足自动化生产线的要求,对已有的工业机器人进行新技术的应用、新的改进也成为了机器人研究的一个大方向。新的改进将会使工业机器人拥有更完善的性能。
为此,本文旨在设计一种可以满足缝纫机针自动生产线加工要求的机器人,完成机械手的,确定传动方案,最后完成机械结构整体设计。使用Solidworks软件完成壳体和主要零部件的建模。本文对此机械手的进一步研究,提供了一种的方案的参考。
关键词:工业机械手;送料;自动线;机械臂
Abstract
Industrial manipulator has been developing faster and faster in industrial field in recent years, and its application scope is wider and wider. Applying industrial manipulator to automatic production line will greatly improve production efficiency. With the expansion of the application scope of industrial robots, people's research on robots has been deepened. In order to meet the requirements of automatic production line, the application of new technology to existing industrial robots and new improvements have also become a major direction of robot research. The new improvements will give industrial robots better performance.
To this end, the purpose of this paper is to design a robot that can meet the requirements of the sewing machine needle automatic production line, complete the manipulator, determine the transmission scheme, and finally complete the overall design of the mechanical structure. Use Solidworks software to complete the modeling of shell and main parts. This paper provides a reference for further research on this manipulator.
Keywords: Industrial manipulator; Feed Automatic line ;Mechanical arm
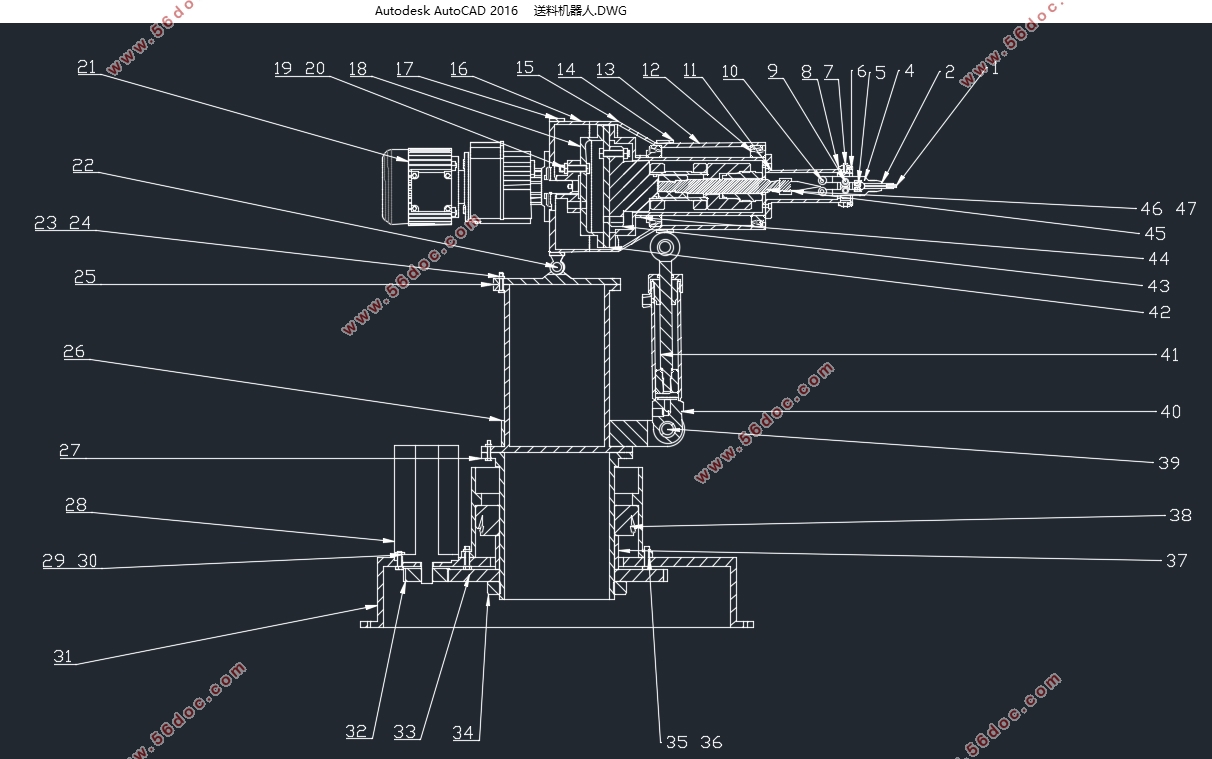
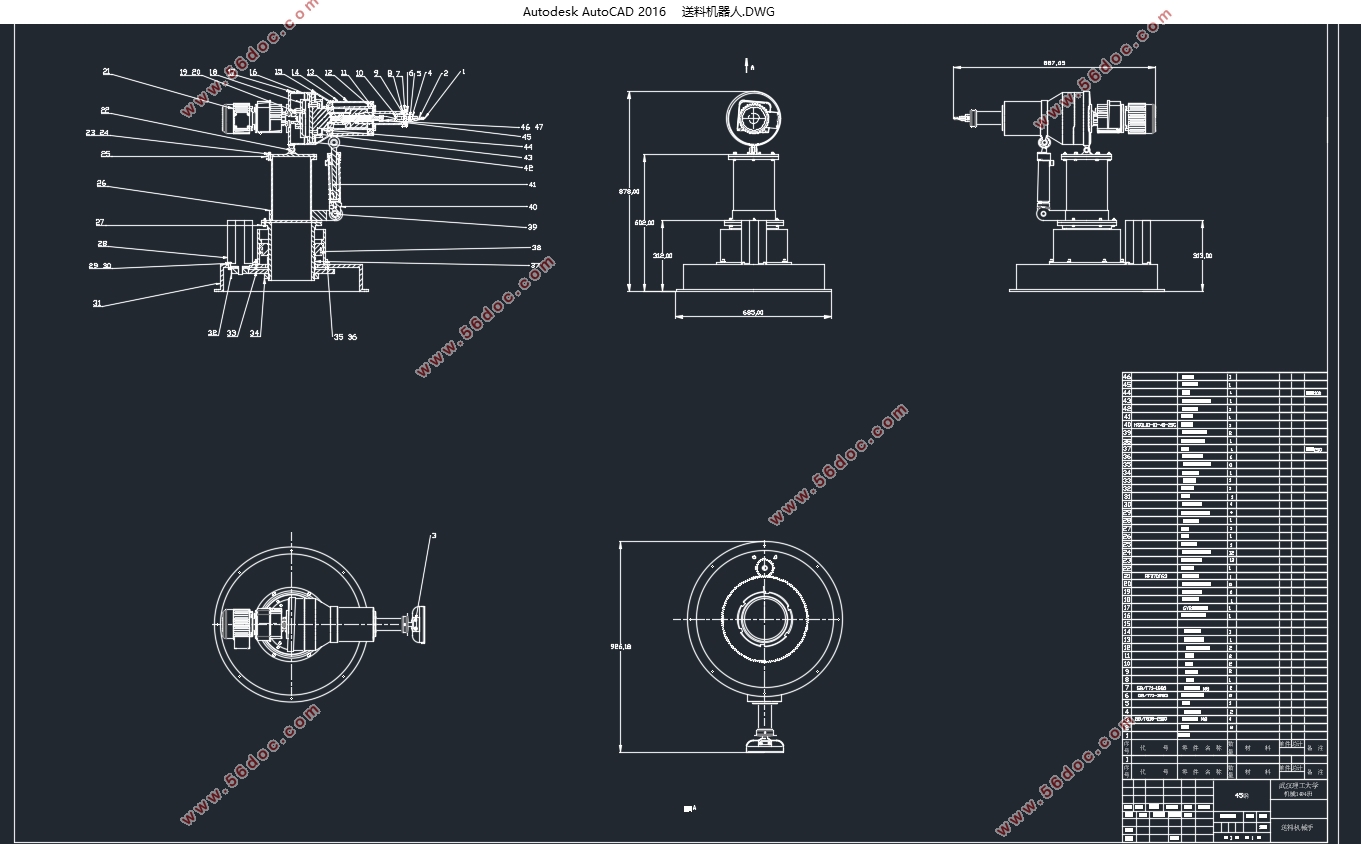
送料机器人的技术参数
一、用途:用于缝纫机针抛光自动线上下料。
二、送料机器人的设计技术参数如表2-1所示:
表2.1 技术参数
名称 数值 名称 数值
抓重Kg 2 手臂回转范围 0°~180°
自由度数 3 手臂回转速度 90°/s
最大工作半径/m 1.5 手腕回转范围 0°~180°
最大中心高/m 1.6 手臂俯仰范围 0~30°
目 录
第一章 绪论 1
1.1 课题的背景、来源及意义 1
1.2工业机器人的发展进程 1
1.3机器人的国内发展现状及趋势 2
1.3 课题的内容安排 3
第二章 绪论 4
2.1 总体设计的思路 4
2.1.1系统分析阶段 4
2.1.2技术设计阶段 4
2.2 自由度和坐标系的选择 5
2.3 送料机器人的技术参数 6
2.4送料机器人的应用场景 6
2.5搬运机器人的组成 7
2.5.1执行机构 7
2.6 本章小结 10
第三章 机器人的腕部 11
3.1 送料机器人腕部设计的基本要求 11
3.2 送料机器人腕部设计计算 11
3.2.1 腕部驱动力矩的计算 11
3.2.2 减速机的计算与选型 12
3.2.3 联轴器的计算与选型 14
3.2.4轴承的选型 16
3.3 送料机器人底座腰部设计 16
3.3.1腰部回转机构 16
3.3.2腰部回转时的力矩分析 17
3.3.3底座电机选型 19
3.3.4小齿轮与大齿轮主要参数 20
3.4 本章小结 21
第四章 机械手手部设计计算 21
4.1手部设计的基本要求 21
4.2夹紧装置原理 22
4.3液压缸驱动力计算 23
4.4选取夹紧用的液压缸型号 24
4.5本章小结 25
第五章 机械手手臂俯仰机构设计计算 26
5.1机械手手臂的基本要求 26
5.2手臂俯仰的力学计算 27
5.3液压缸的选取 27
5.4连接圈的结构尺寸设计 28
5.5本章小结 28
第六章 总结与展望 29
6.1总结 29
6.2展望 29
参考文献 30
致谢 32
|
