下肢助行机构设计及仿真(含UG三维图)(任务书,开题报告,文献摘要,论文说明书16000字,UG三维图,答辩PPT)
摘要
近十几年来,世界各国都在积极发展外骨骼机器人行业 ,如今外骨骼机器人技术正在不断发展成为一项比较成熟的技术。下肢助行机构属于外骨骼机器人中的一种,大类为特种机器人,涉及多个技术领域,近年来,已经成为各个国家的发展方向。下肢助行机构可以将人和机械绑定到一齐,将人类的劣势利用机械的优势来进行互补,下肢助行机构在军事、医疗等领域有着十分重要的作用,从而下肢助行机构有着良好的未来,具有很实际的使用价值。
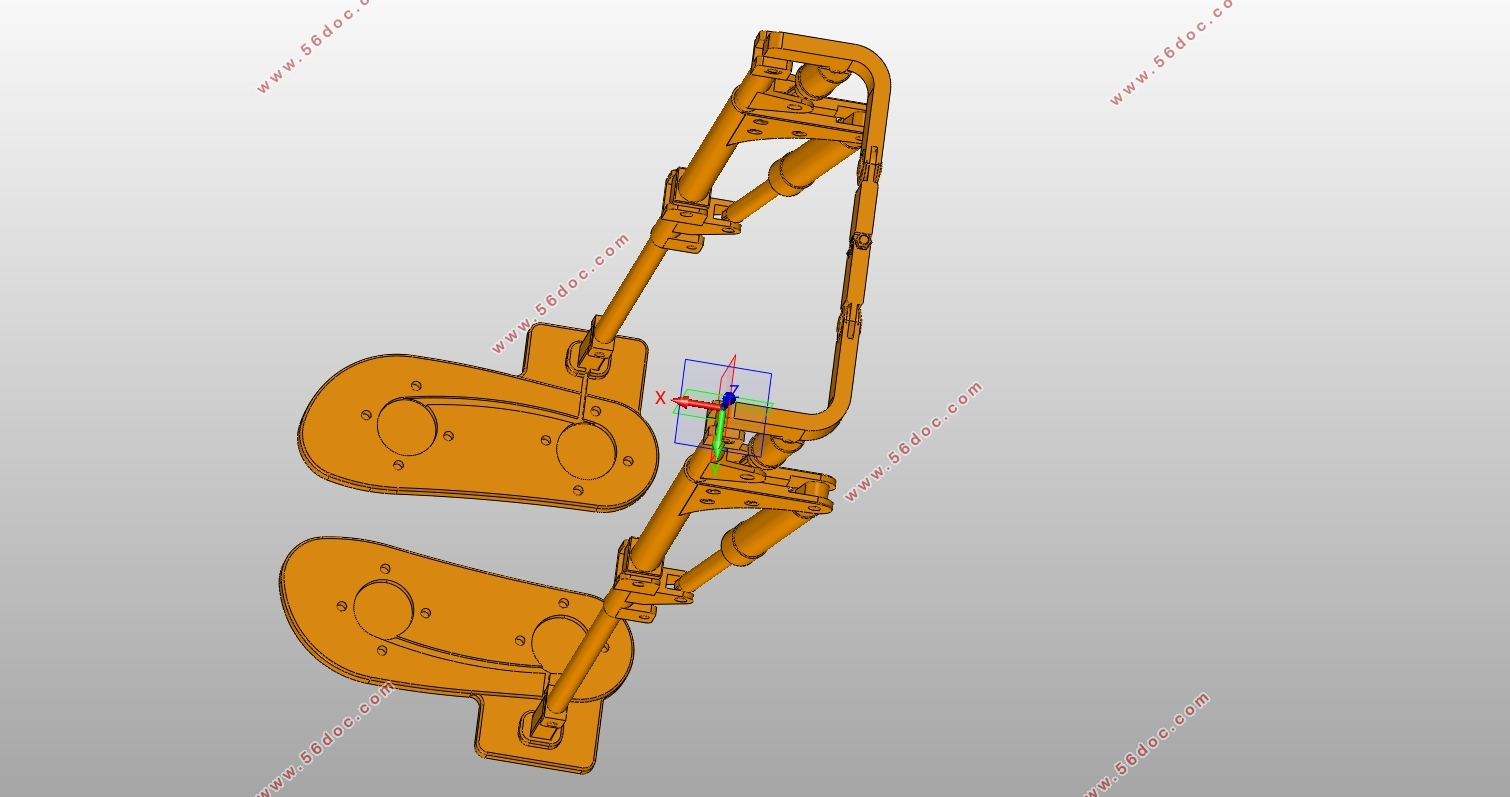
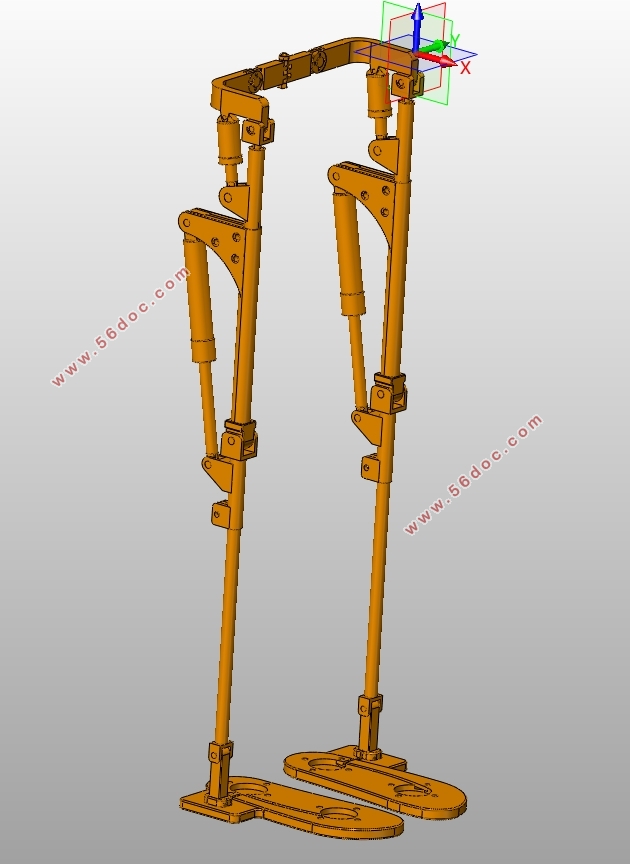
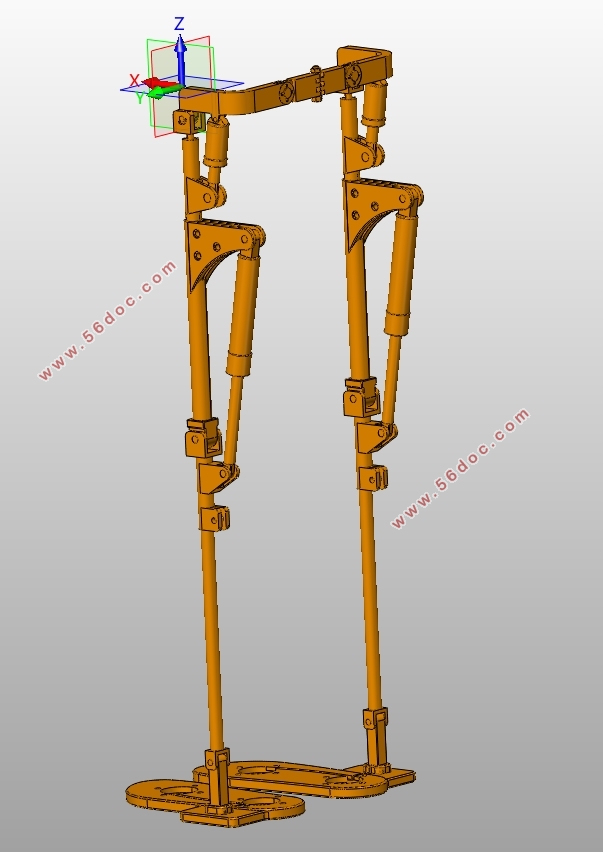
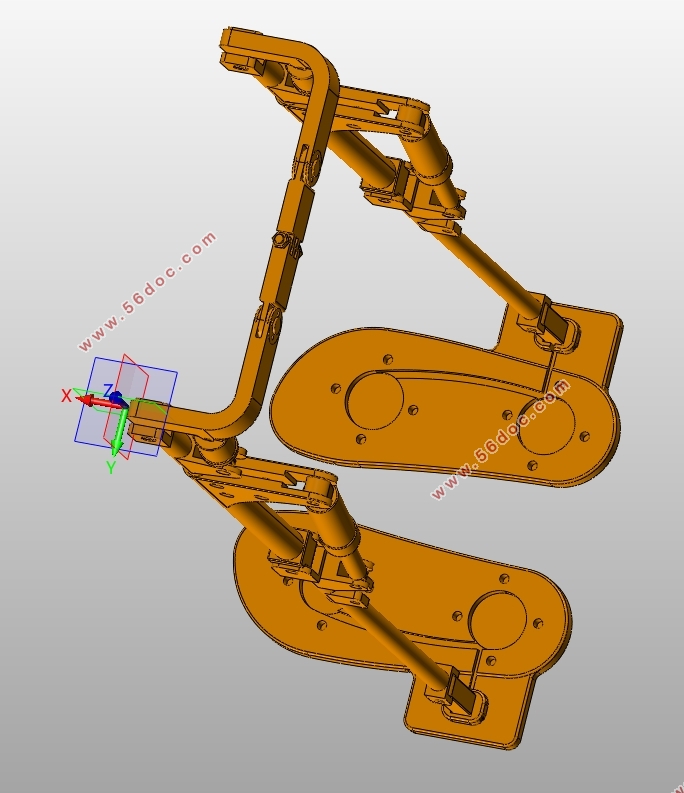
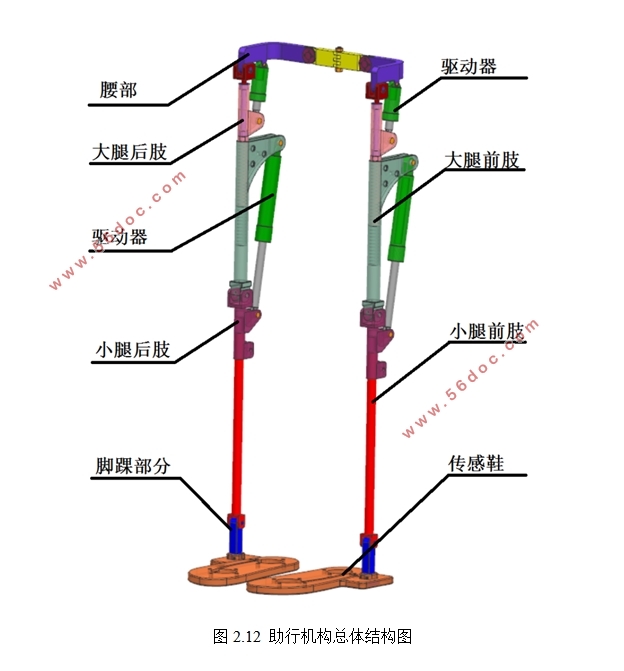
本次论文主要通过研究,确定下肢助行机构的设计要点及实际应用需要,根据人体运动学,对机构进行拟人化设计,把各个部件和人体的各个部位结合,分析每个构件的需求,建立三维模型,并利用仿真软件ADAMS进行运动仿真,分析机构模拟运动的方式,确定该机构是否适合使用。 此外,把人体模型和下肢助行机构模型结合,进行运动拟合度分析,分析下肢助行机构和人体模型的配合情况。最终,得出该下肢助行机构的仿真结果,确定该下肢助行机构是否合理。
关键词:下肢助行机构;人体工程学;人体动力学;ADAMS 仿真
Abstract
Over the past decade, all countries in the world are actively developing the robot industry, and now the robot technology is developing into a more mature technology. The lower limb walking aid mechanism is one kind of the outer skeleton robot, the big kind is the special robot, involves many technical fields, in recent years, has become the development direction of each country. Lower extremity aid agencies can be bound of people and machinery to together, the human weaknesses by mechanical advantage to be complementary, lower limb walking aid agencies in the military, medical and other fields has a very important role, to lower extremity can mechanism has a good future, has very practical value.
This paper mainly through the study, to determine the design points of the lower extremity of the aid walking mechanism and practical application, according to the human body kinematics, of mechanism of personification design and combine the various parts and body parts, the demand analysis of each component, three-dimensional model is established, and the simulation software ADAMS motion simulation and analysis of mechanism motion simulation method to determine whether the agency for use. In addition, combined with the human body model and the lower limb walking aid mechanism model, the fitness analysis was carried out to analyze the coordination of the lower limb walking aid mechanism and the human body model. Finally, it is concluded that the simulation results of the lower limb walking aid mechanism, determine whether the lower limb is reasonable.
Keywords: Lower limb walking aid mechanism; Human body engineering; Human dynamics; ADAMS simulation
2.2 人体下肢运动机理的研究
下肢助行机构的运动根据人体运动而来,而人体运动主要通过骨骼和肌肉还有关节一起配合运动下才能使人体运动起来,在这里面当中,骨头为杆件,而肌肉为驱动器,而关节就是一个限制运动方式的铰链 [7]。人体下肢运动较为复杂,但是下肢助行机构必须和人体运动相统一,自由度、运动形式必须和人体一致,这样才能保证有较好的拟人度,所以,我们必须根据人体下肢生理模型及人体下肢运动模型来设计下肢助行机构,同时分析人体行走时的步态,力求让人体和下肢助行机构能稳定行走。
2.2.1 人体下肢骨骼关节的形式
下肢助行机构主要根据人体的下肢骨骼模型来设计它的各个杆件和部位,即下肢助行机构的机械部分,在人体中骨骼和机构连接,需要运动时,神经系统会发令对肌肉进行控制,控制肌肉收缩与舒展,从而达到运动的目的[8]。人体的下肢生理模型主要由人体的各个游离的下肢骨骼和盆骨组成,有三个关节,分别为髋关节、膝关节及踝关节,三个关节把人体下肢连接在一起,实现人体的运动,人体下肢的运动都由这几个部位相互作用,相互配合所得,人体下肢的运动离不开这四个部分。查阅资料,得到人体的下肢骨骼构架图,
目录
摘要 二
第1章 绪论 1
1.1 课题的来源 1
1.2 课题研究的背景和意义 1
1.3 国内外研究现状 2
1.3.1 国外下肢助行机构的研究现状 2
1.3.2 国内下肢助行机构的研究现状 2
1.4 下肢助行机构的关键技术 3
1.5 课题研究的主要内容 4
第2章 人体下肢运动机理及助行机构总体方案研究 5
2.1 引言 5
2.2 人体下肢运动机理的研究 5
2.2.1 人体下肢骨骼关节的形式 5
2.2.2 人体下肢步行模型研究 9
2.3 下肢助行机构的设计要点 10
2.3.1 下肢助行机构的拟人化设计 10
2.3.2 下肢助行机构的兼容性设计 11
2.3.3 下肢助行机构的安全性设计 11
2.3.4 下肢助行机构的刚度要求 12
2.4 下肢助行机构的总体方案 12
2.4.1总体方案一 12
2.4.2总体方案二 13
第3章 下肢助行机构结构设计及分析 16
3.1 下肢助行机构结构设计 16
3.1.1 下肢助行机构的关节机构 16
3.1.2 驱动部分 19
3.1.3 各杆件及杆长 20
3.1.4 驱动器行程的确定 22
3.1.5 传感器的布置 22
3.2 下肢助行机构中大小腿杆件的静力学分析 23
3.3 本章小结 24
第4章 下肢助行机构的仿真分析 25
4.1运动仿真及其意义 25
4.2基于ADAMS的运动学仿真 25
4.2.1 ADAMS/View环境下模型仿真 25
4.2.4 下肢助行机构的拟人化仿真 35
4.3 本章小结 39
第5章 下肢助行机构的经济性分析 40
5.1下肢助行机构价格的构成及计算 40
结论 41
参考文献 42
|
