空调管道清洁机器人设计(含CAD零件图装配图,SolidWorks三维图)(任务书,开题报告,论文说明书13000字,CAD图5张,SolidWorks三维图)
摘要
随着社会经济的发展,中央空调被广泛应用到公共场所中,为人们创造了舒适的生活与工作环境。但中央空调通风管道因为长时间的使用会积聚灰尘,而且管道内的环境也会滋生各种微生物,这些都是无法避免的,管道如果不能得到及时的清理,其中的灰尘和微生物就会随着气流进入室内,被人们所吸收,进而对人们的身体健康造成影响。同时,灰尘还会影响制冷效果,提高空调功耗,造成能源的浪费。因此,从身体健康和节约能源的角度出发,对空调管道清洁机器人的研究是很有必要的,这具有很高的实用价值与广阔的市场前景。
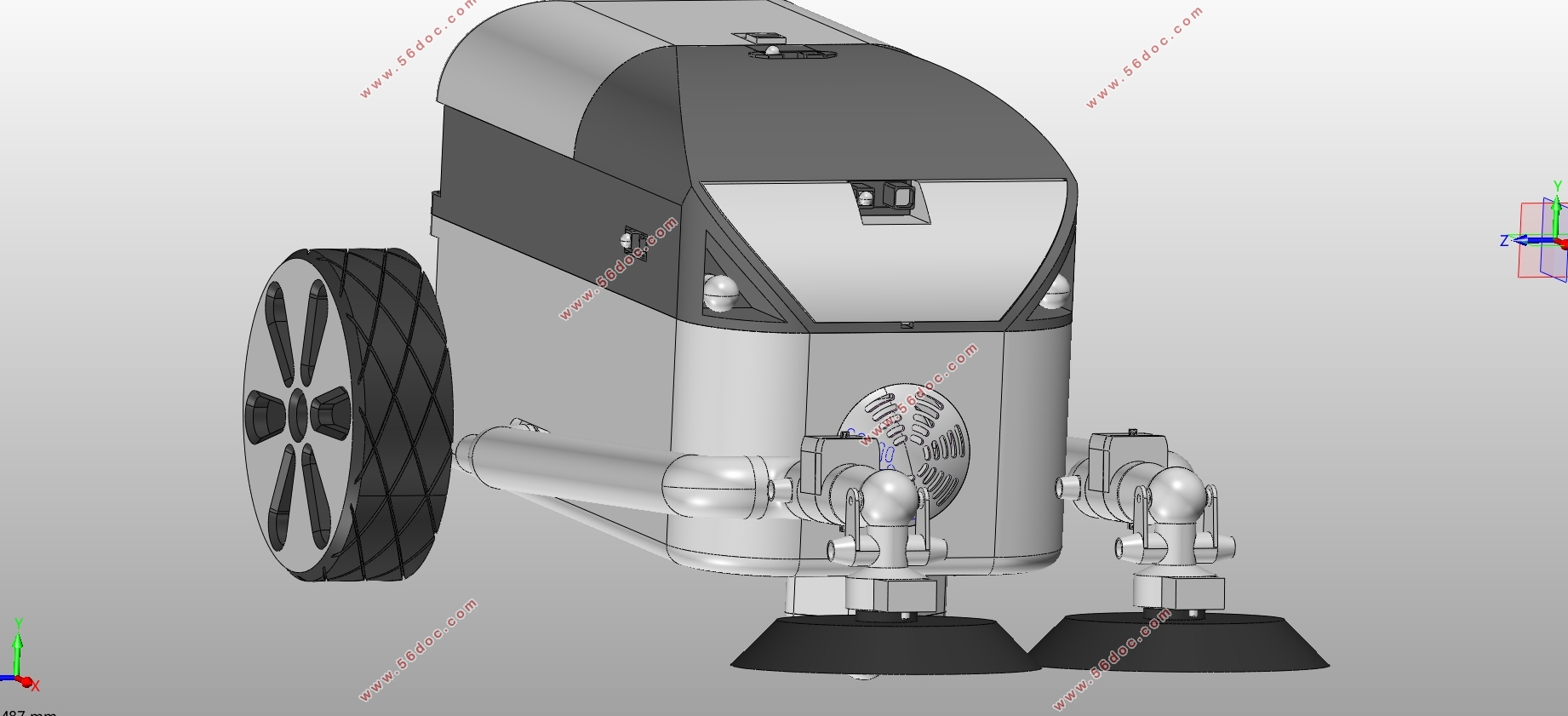
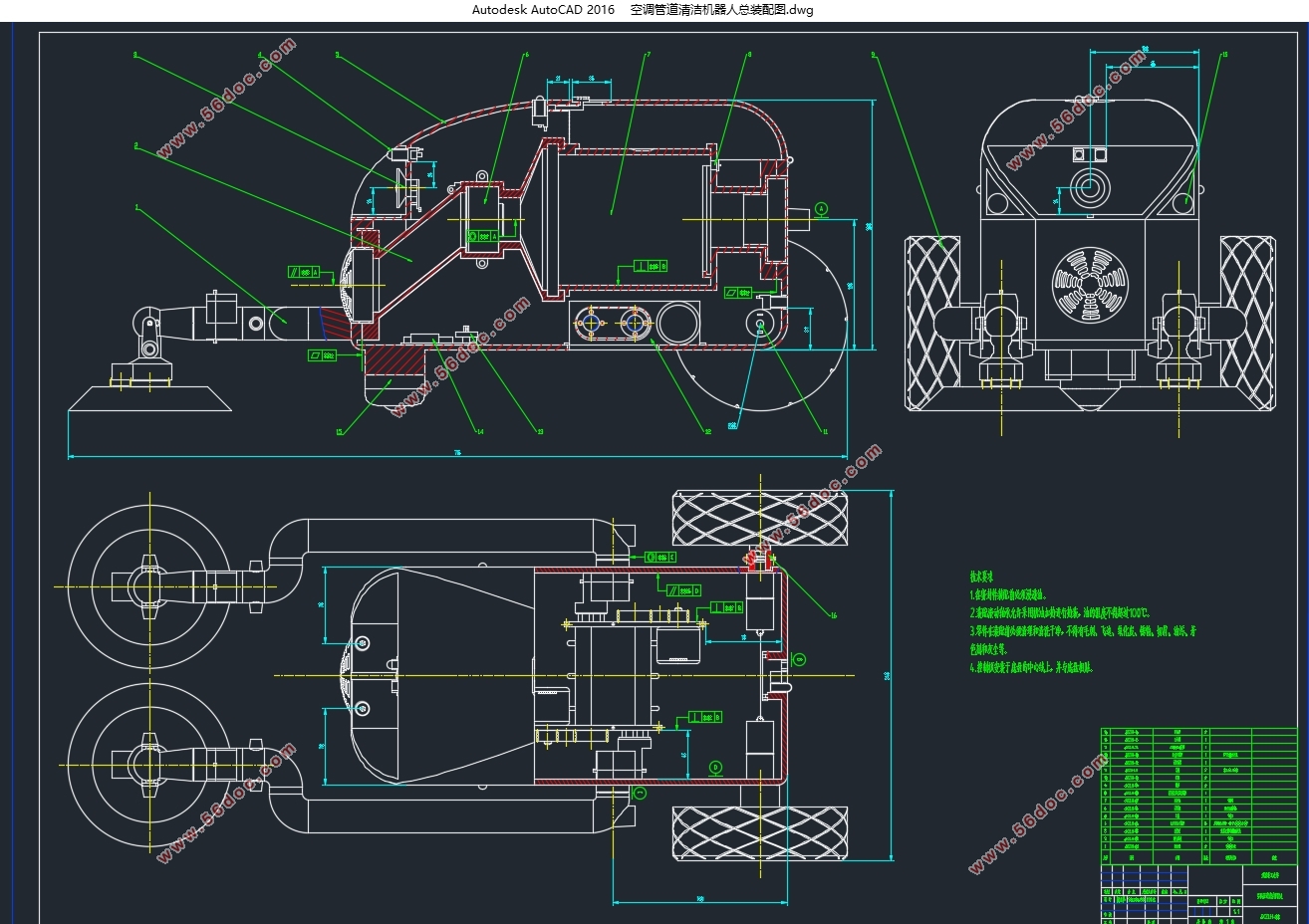
本文首先介绍了国内外在空调管道清洁机器人方面的研究现状,并分析了各种机器人的优点和不足,然后在此基础上,提出了一种新型管道清洁机器人的设计。该管道清洁机器人包括轮式移动机构、清扫机构和吸尘机构,同时安装有多种传感器,使机器人能够自主清洁管道内壁。机器人还配备了摄像装置,以便操作人员随时查看管道内部环境。
本文确定了机器人各部件的结构尺寸和位置关系,并给出了马达、舵机、轮子等其它部件的相关参数,对重要部件进行了受力分析和强度校核。对机器人的控制系统也进行了模块设计,从而使机器人能够在传感器的协助下自主工作。
最后,本文对主要的设计进行了总结,并对所涉及的清洁机器人提出了展望。
关键词:中央空调管道清洁机器人;结构设计;受力分析;Arduino
Abstract
With the socio-economic development, central air conditioning is widely used in public places, it is for people to create a comfortable living and working environment. Due to long-term use, the pipeline will accumulate dust, and the pipeline environment will also breed microorganisms, these are unavoidable. If the pipeline can not be cleaned in time, the dust and microbes in the pipeline will be absorbed into the room with the air flow, which is absorbed by people and has an impact on people's health. At the same time, dust will also affect the cooling effect, improve air conditioning power consumption, resulting in energy waste. Therefore, from the health and energy point of view, the air conditioning pipe cleaning robot research is necessary, which has a high commercial value and practical value.
This paper first introduces the domestic and foreign research status of air conditioning pipe cleaning robot, and analyzes the advantages and disadvantages of various robots, and then on this basis, put forward a new design of pipeline cleaning robot. The pipe cleaning robot includes wheeled moving mechanism, cleaning mechanism and vacuuming mechanism, and it is also equipped with a variety of sensors, so that the robot can independently determine the surrounding environment. The robot is also equipped with an imaging device so that the operator can view the internal environment of the pipe at any time.
In this paper, the structural size and position of the components of the robot are determined, and the relevant parameters of the motor, steering gear, wheel and other components are given, and the important components are analyzed and the strength check is made. The control system of the robot has also been designed so that the robot can work autonomously with the help of the sensor.
Finally, this paper summarizes the main design contents and provides suggestions for the improvement of the robot.
Keywords:Central air-conditioning duct cleaning robot;Structural design,;force analysis;Arduino
机器人各项性能指标
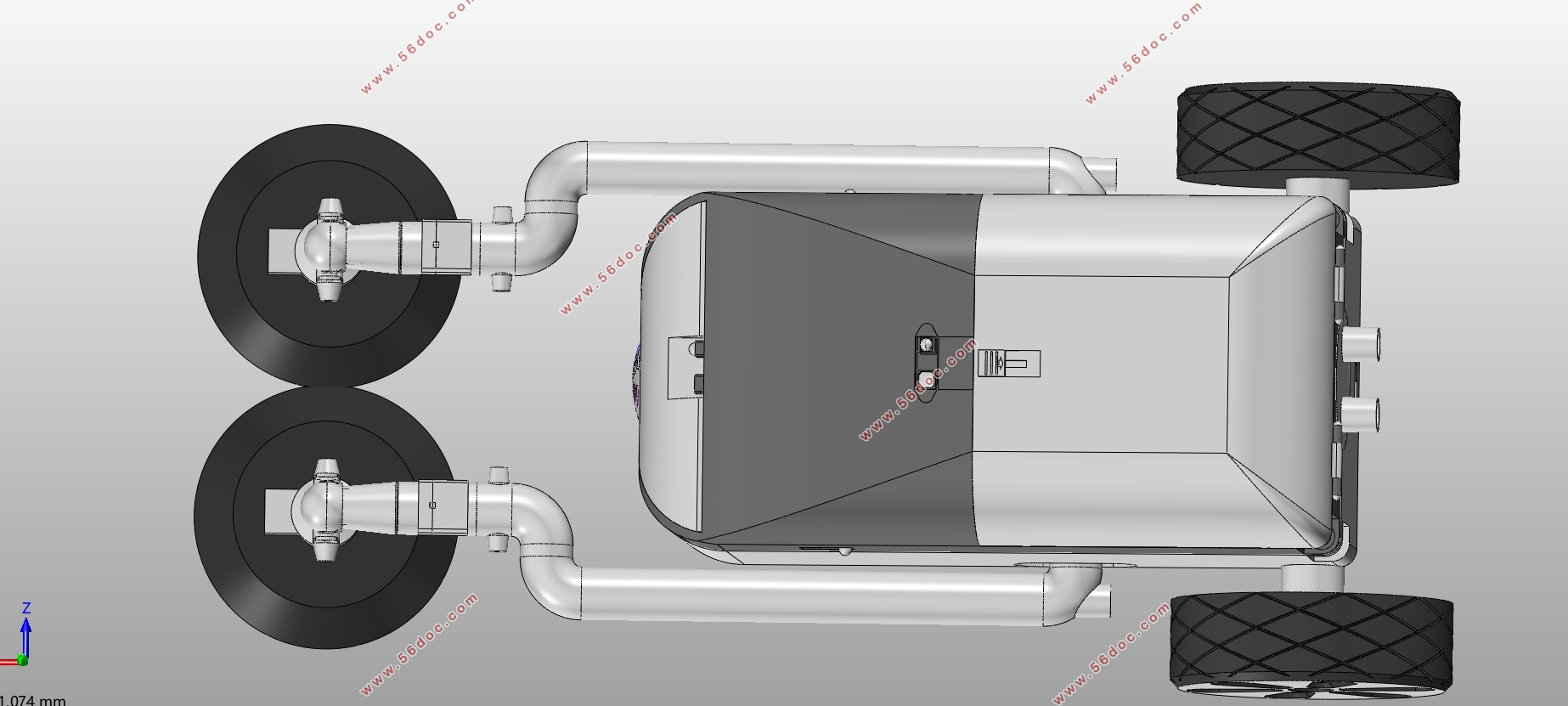
中央空调通风管道尺寸形状及尺寸要求为矩形管道,宽450mm,高300~600mm。其他的技术要求为:
机器人最大行进距离:50m
机器人行进速度:7m/min
两臂最大水平展距:<450mm
两臂最大清洁高度:550mm
红外测距传感器最大探测距离:150cm
灰尘盒最大容量:130mm×140mm×120mm=2184000mm3=2.184dm3
抽风机最大功率:200W
机器人整体尺寸:400mm×340mm×285mm
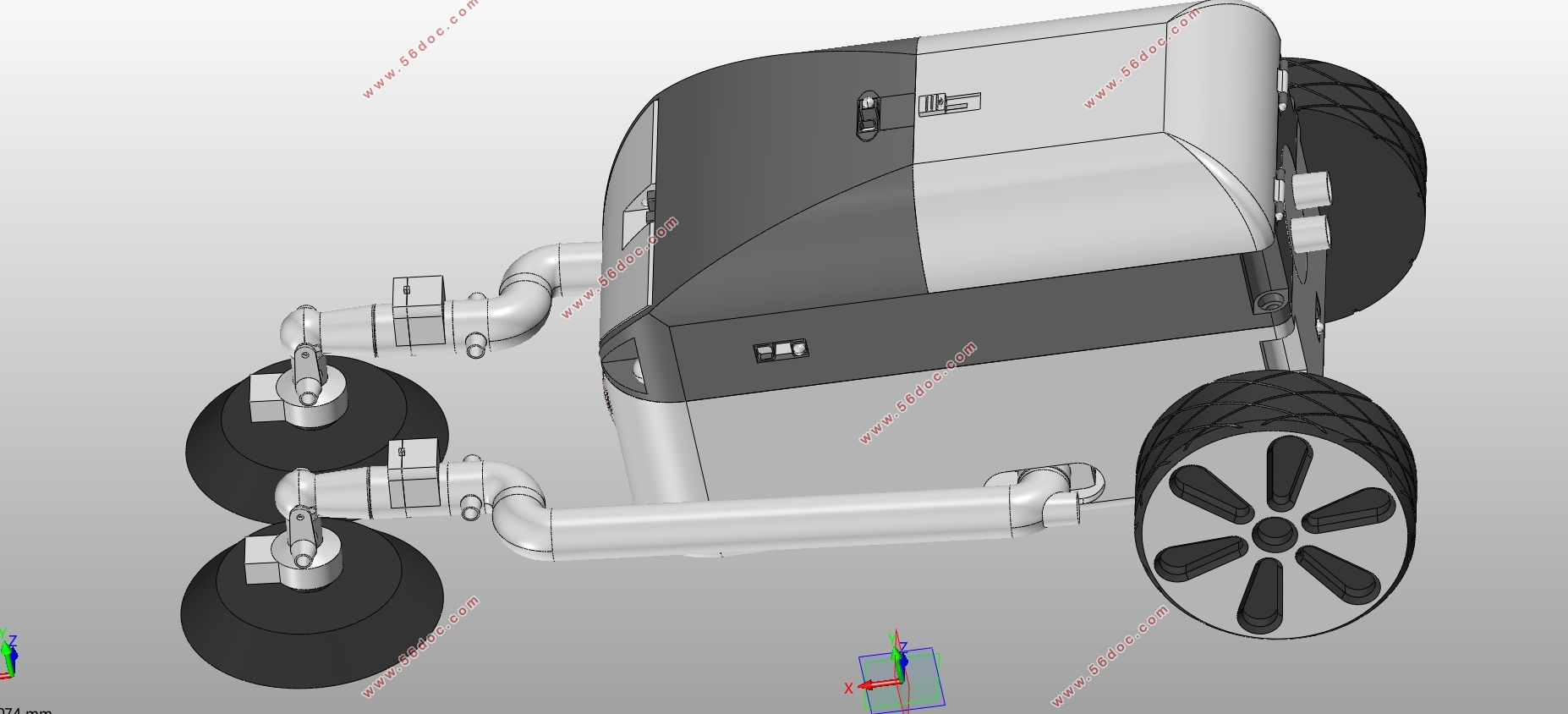
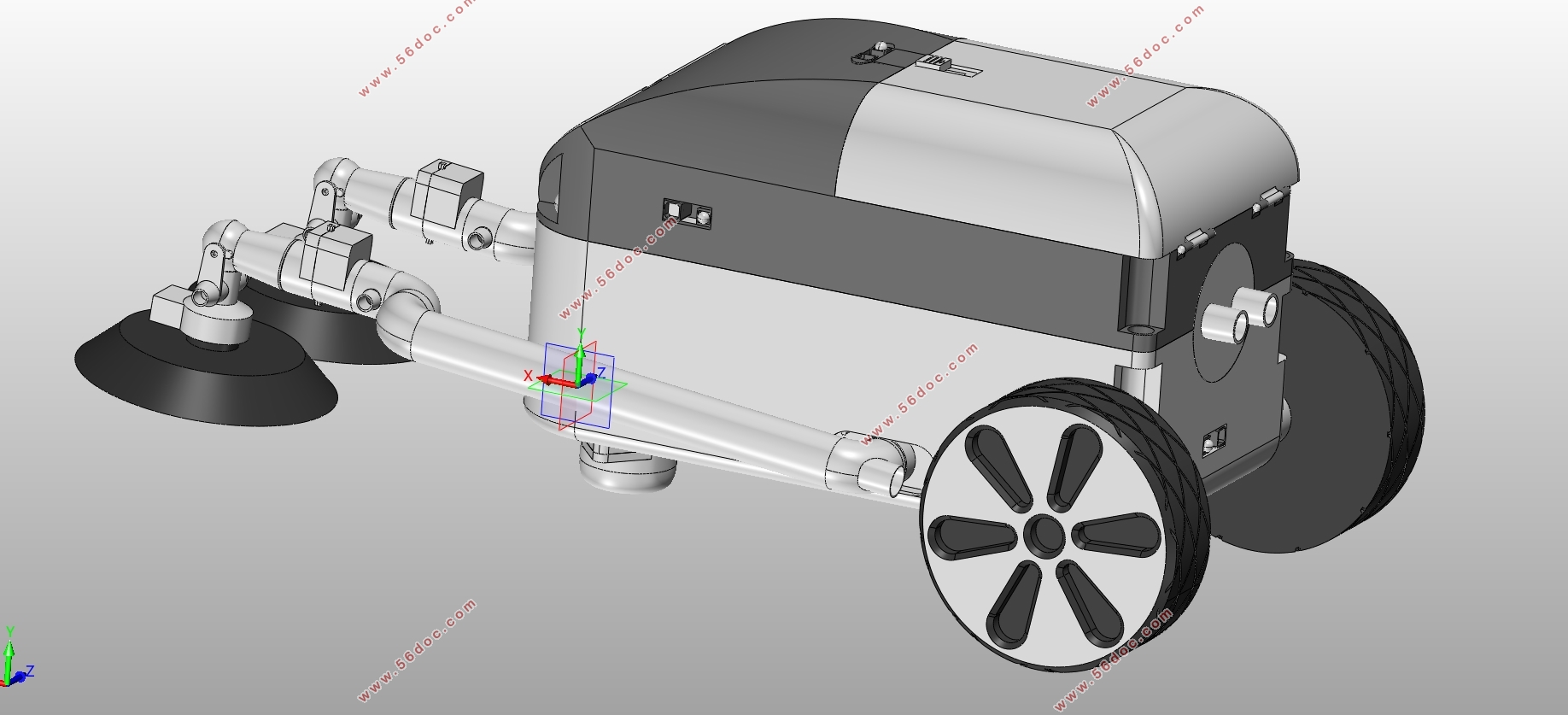
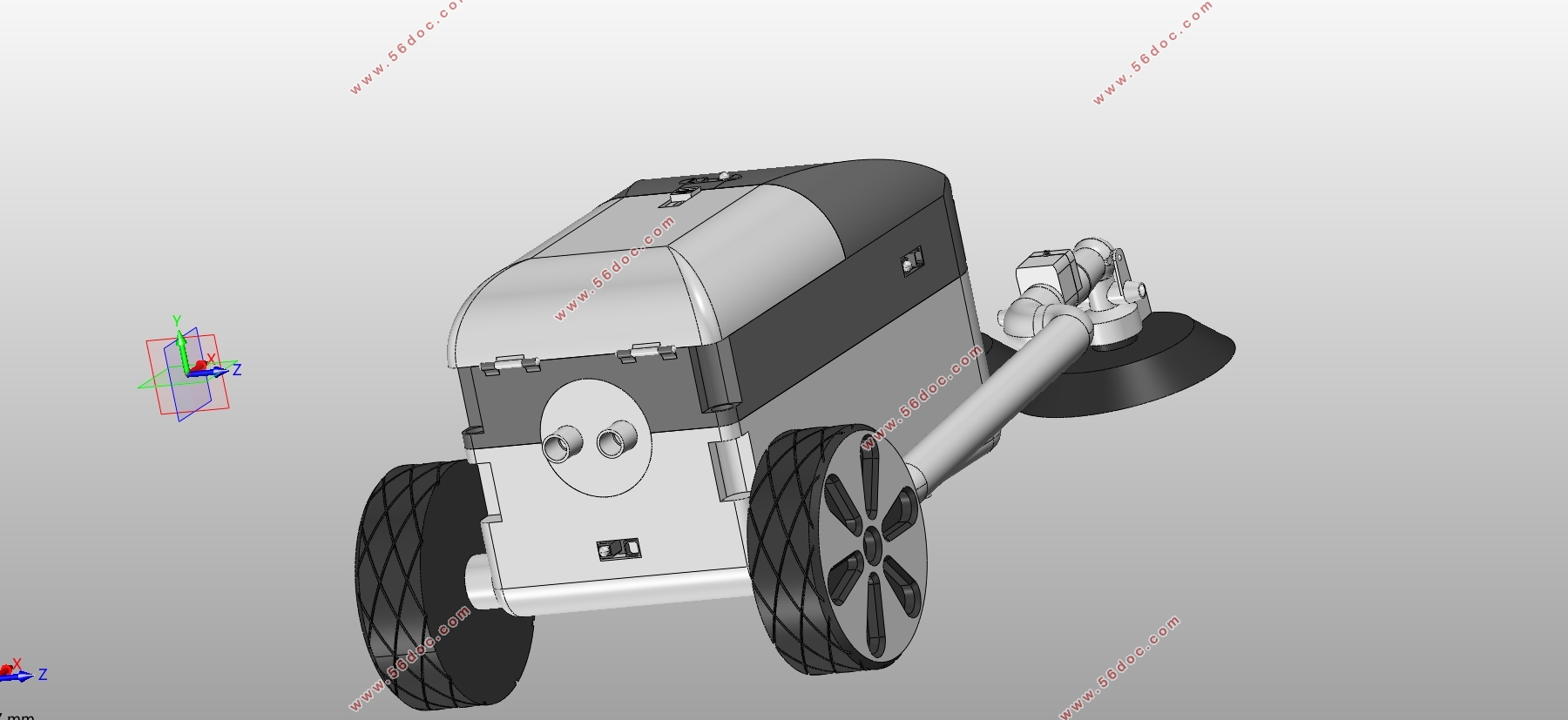
2.3机器人工作原理以及功能实现
机器人两臂的吸盘上附着毛刷,吸盘在马达的驱动下旋转,带动毛刷清扫管道内壁分离,机器人的内部装有与普通吸尘器类似的结构:集尘盒、过滤片、抽风电机。对管道的清洁次序依次是:先清理上壁,再清理两侧壁,最后清理底壁。之所以这样安排清洁次序,是因为清洁上壁时和侧壁时会有少量灰尘在重力作用下落在底壁,因此,底壁放在最后清洁可以提高对管道内壁的清洁度。清洁机器人的工作流程为:
(1)先对顶壁清洁,机器人顶端红外测距传感器测机器人与顶壁距离,并计算出两臂的提升角度,然后控制两臂内的舵机,由舵机转动相应角度,最终使吸尘盘正对顶壁,并与之贴合。以上工作完成后,吸尘盘的驱动电机开始转动,毛刷开始工作,后轮驱动电机带动两轮旋转,使机器人行进,灰尘在吸力作用下进入灰尘盒内。顶壁分两次进行清洁。
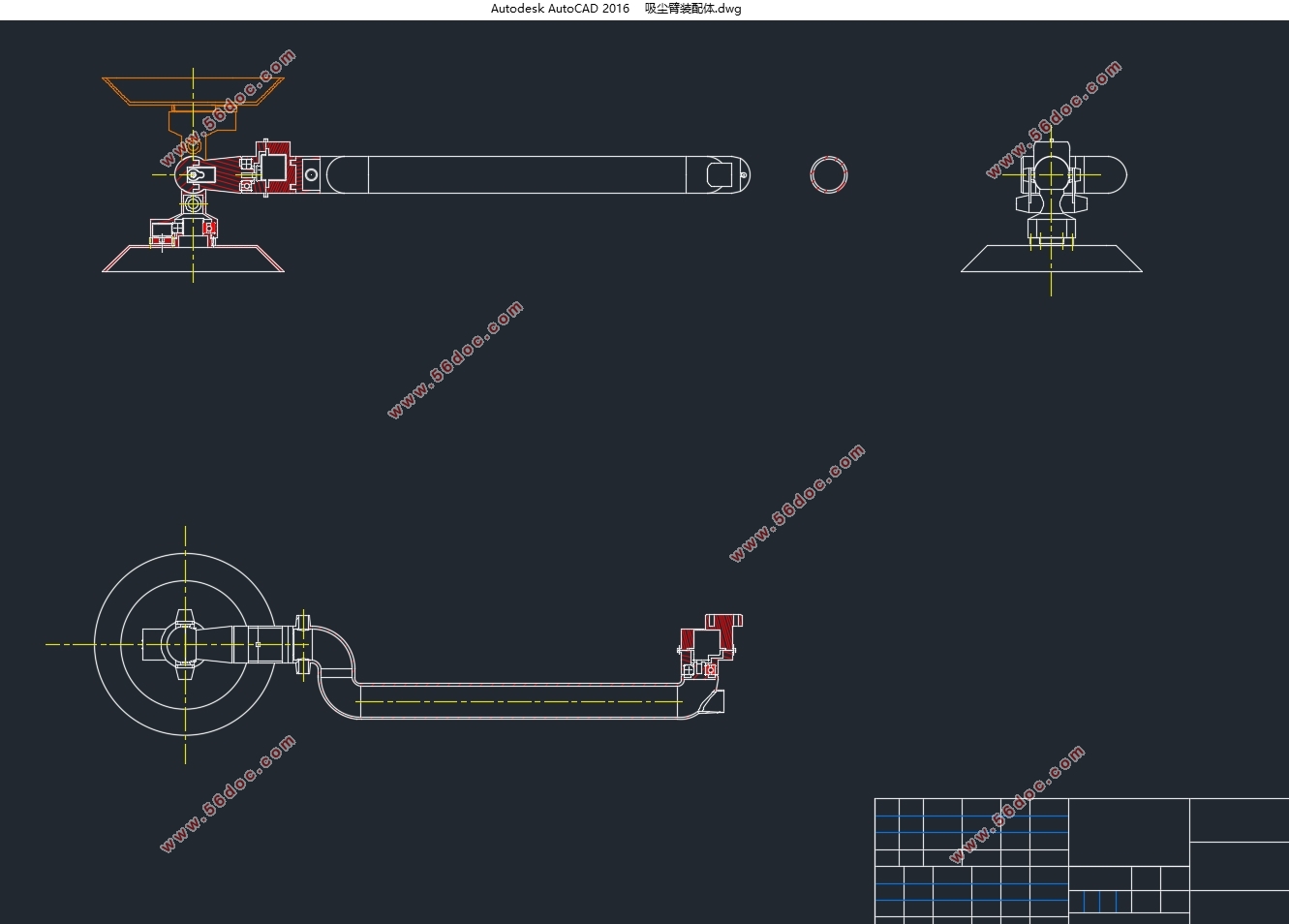
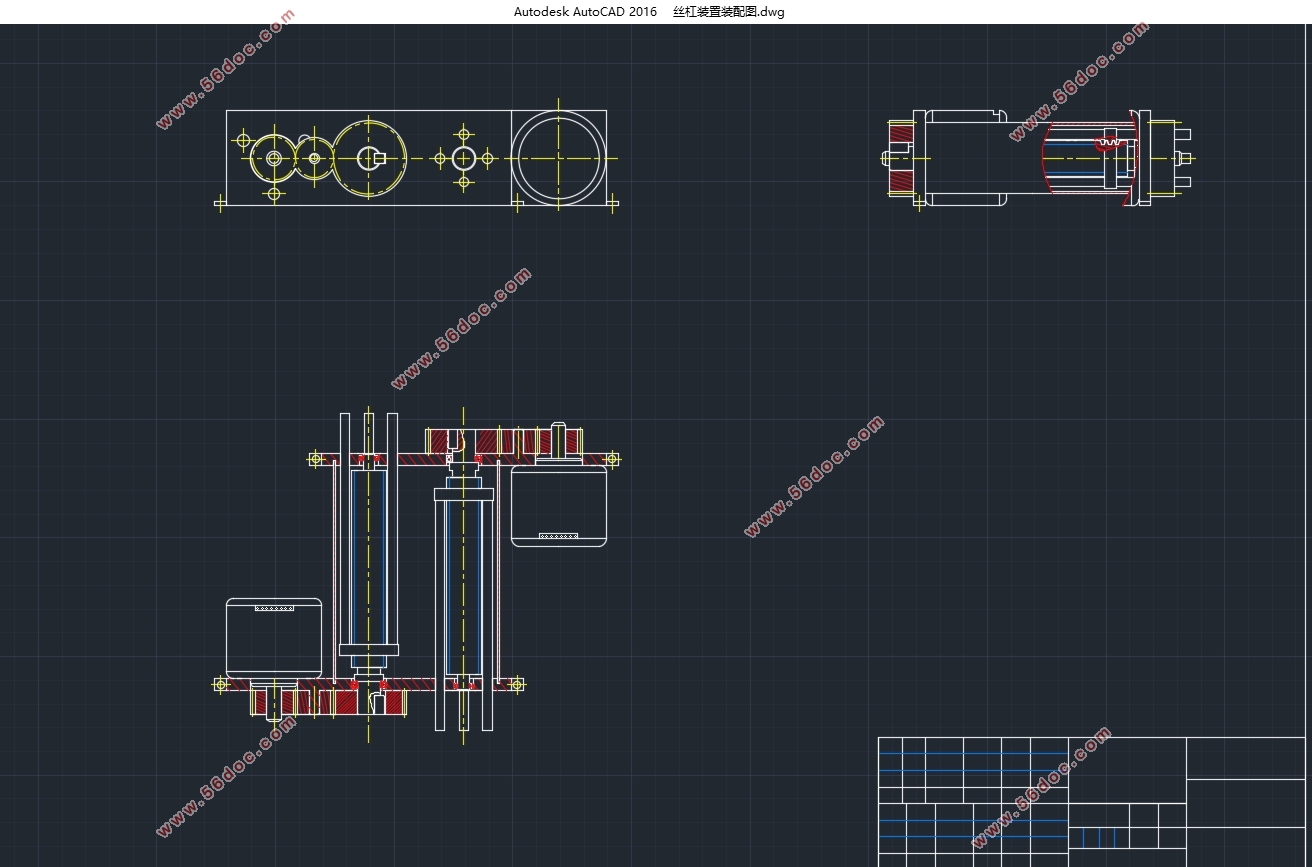
(2)顶壁清洁完成后,再对侧壁进行清洁。控制中心首先会向位于两臂前端的转向舵机发出信号,使之旋转至两吸尘盘分别面向两侧壁。然后机器人两侧红外测距传感器会检测机器人与两侧内壁的距离,并反馈给Arduino控制中心相关信号,结合清理顶壁时测得的与顶壁的距离,控制中心通过计算得出两臂各自需要伸展的距离,并计算出侧壁的清洁次数。然后将数据发送给驱动两臂伸展的伺服电机以及控制两臂转向的舵机,由伺服电机通过齿轮传动带动丝杠转动,实现两臂的伸展;由舵机实现两臂的旋转。侧壁的清洁次数取决于侧壁的高度。
(3)最后,对管道底壁进行清洁,清洁过程与顶壁类似,吸尘盘在舵机的作用下正对底壁,并与之贴合。底壁同样也是分两次进行清洁。
在机器人的工作过程中,可能需要转弯,可以通过安装红外传感器测距防止碰撞到管道壁,另外还有需要防止零部件过热,需要检测灰尘盒内收集到的灰尘量等等,这些功能都是通过相应的传感器实现。另外,机器人前端安装有摄像头,可实时监控管道内情况,并将之传送给主控制台。
由于无线通讯在空调管道内可能会受到干扰,因此机器人与主控制台的通讯采用有线通讯方式,供电也采用有线供电,这样既解决了机器人的供电及通讯问题,同时也省去了机器人的电池组,缩小了机器人的体积。
目录
第1章绪论 1
1.1课题研究背景 1
1.2管道清洁机器人的研究现状 1
第2章空调管道清洁机器人的总体设计 2
2.1总体设计方案 2
2.2机器人各项性能指标 2
2.3机器人工作原理以及功能实现 2
第3章清洁机器人结构设计 4
3.1机器人主体尺寸确定 4
3.2机器人移动机构设计 5
3.3机器人底盘与上盖的设计 6
3.3.1机器人箱体尺寸设计 6
3.3.2底盘设计 6
3.3.3上盖设计 7
3.4机器人丝杠驱动装置设计 7
3.4.1 驱动方式选择 7
3.4.2 设计 8
3.5.1吸尘臂的主体设计 11
3.5.2 两臂的转向机构设计 12
3.6机器人吸尘盘及其转向机构的设计 12
3.6.1吸尘盘的设计 12
3.6.2吸尘盘转向机构设计 13
3.7机器人吸尘机构的设计 13
3.8机器人传感器的选择 15
3.8.1测距传感器 15
3.8.2 温度传感器 16
3.8.3 变介质型电容传感器 16
3.9机器人的照明装置和摄像装置 16
3.9.1照明装置 16
3.9.2 摄像装置 17
第4章机器人的控制系统设计 18
4.1机器人的工作过程及控制目标 18
4.1.1主程序 18
4.1.2子程序设计 20
4.2机器人的控制方式选择 25
4.3机器人的程序实现 26
4.3.1 Arduino单片机 26
4.3.2电机正反转控制 26
4.3.3舵机控制 27
第5章机器人的工作过程仿真及分析 29
5.1机器人的运动仿真 29
5.2机器人的受力分析 31
第6章总结与展望 33
参考文献 34
致谢 35
|
