CWGS 400型擦窗机伸缩臂结构三维结构设计(含PROE三维图)(任务书,论文说明书11000字,PROE三维图)
摘 要
在本篇文章当中,是以结构分析作为主要的理论基础,并且运用PRO/E软件来进一步辅助理论。论文的研究对象是日常使用的擦窗机的主要承重部分即擦窗机的伸缩臂。首先对伸缩臂利用PRO/E进行简单的结构基础分析,再初步分析的基础上,利用专业知识和分析结论,对于伸缩臂的结构做优化设计。PRO/E软件在整个的分析过程当中起着重要的作用。在软件得出理论参数的基础上,建立模型。本文所建立的参数模型与以往的模型相比较而言,主要区别是建立模型的方法。软件当中主要利用其焊接模块把擦窗机伸缩臂的各个部分的零件焊接信息加入到参建模当中。再者,论文还对擦窗机的工作状况进行了参数分析,并对数据进行整理,加入了大量的力学计算。
在此基础之上,发现伸缩臂在承重方面还有很大的不足,这就是本文研究擦窗机伸缩臂的实际意义所在。对于计算得出的伸缩臂承力的弊端,在初步分析之后,认为其还有很大的优化空间和余地。
本文研究涉及的计算主要在以下3个方面:
1.对擦窗机进行了概述;
2.对CWGS 400型擦窗机伸缩臂进行了阐述和设计;
3.参照擦窗机CWGS 400型和机械设计手册对单臂伸缩型擦窗机进行了电动机 的选择。
关键词:擦窗机;伸缩臂;设计计算;Pro/e
The three-dimensional structure of telescopic boom on the basis of CWGS type-400 window-cleaner
Abstract
In this article, structural analysis which is the primary theoretical basis, and the use of PRO / E software is in order to assist the theory furtherly. The object of the paper is the main load-bearing part of gondola which is telescopic boom for daily use. Firstly, the study of telescopic is analyzed on the basis of a simple analysis of the structure by PRO/ E .Then the basis of the preliminary analysis, the use of the expertise and analytical conclusions are made for the telescopic boom structure optimization design. PRO / E software plays an important role in the analysis process.Derived theoretical parameters in the software,which is based on the established model. Parameters of this model, compared with the conventional model, the main difference is the method of building-up method . The main use of its software among the various parts of the welding module gondola, telescopic parts welded information add to the reference modeling them. Furthermore, the working conditions of gondola parameters are also analyzed in this paper, and the data collation add up a lot of mechanics calculations. On this basis,there is still a great lack of load-bearing telescopic boom, which is the actual significance of this study of telescopic boom lies in . For the calculated bearing telescopic boom drawbacks, after a preliminary analysis, that there is still much to optimize its space and room.
Calculation of this study involved mainly in the following three aspects:
1 for an overview of the gondola;
2 for telescopic of CWGS type-400 gondola elaborating and designing;
3 The reference of gondola CWGS type-400 and Mechanical Design Manual for telescopic arm of gondola were selected motor.
Keywords: BMU; telescopic boom; design calculations; Pro / e
擦窗机伸缩臂的结构简介及设计
2.1 擦窗机主要参数
额定载荷 400kg 升降速度9m/min 臂长16~24m
行走速度6m/min 变幅速度 2~3m/min 电源特性 3*380V,50HZ
回转速度180/100s
上述参数是某种擦窗机具备的基本使用参数。这种擦窗机就很实用。但是擦窗机的使用并不是能够完成各种楼面的作业的,这时我们就要考虑到配合使用伸缩臂,根据具体的建筑物的要求,选择适用的伸缩臂也是一项极为重要的工作。

目 录
CWGS 400型擦窗机伸缩臂结构三维 I
摘 要 I
Abstract II
第一章 绪 论 1
1.1 课题背景及意义 1
1.2 本课题的发展现状 1
1.2.1 擦窗机设计研究 1
1.3 日常生活中的擦窗机分类 2
1.4 本文研究内容 3
第二章 擦窗机伸缩臂的结构简介及设计 4
2.1 擦窗机主要参数 4
2.2 伸缩臂概述 4
2.3 臂架伸缩机构的驱动形式 4
2.4 臂架结构比较 4
2.5 伸缩臂结构形式确定 5
2.5.1 液压传动原理 5
2.5.2 在液压油缸变幅型式下的伸缩种类 5
2.5.3 伸缩臂的设计 8
第三章 擦窗机伸缩臂尺寸设计及计算 10
3.1 臂架伸出时状态图 10
3.2 臂架回缩时状态图 10
3.3 臂架尺寸及受力分析 10
3.4 伸缩臂形式确定 11
3.4.1 伸缩臂结构确定 11
3.4.2 伸缩臂刚度校核 13
3.5 臂架部分液压元件选型 17
3.5.1 调平油缸选型 17
第四章 基于Pro/E的擦窗机伸缩臂三维建模 18
4.1 设计平台的选择 18
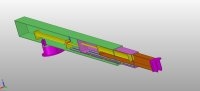
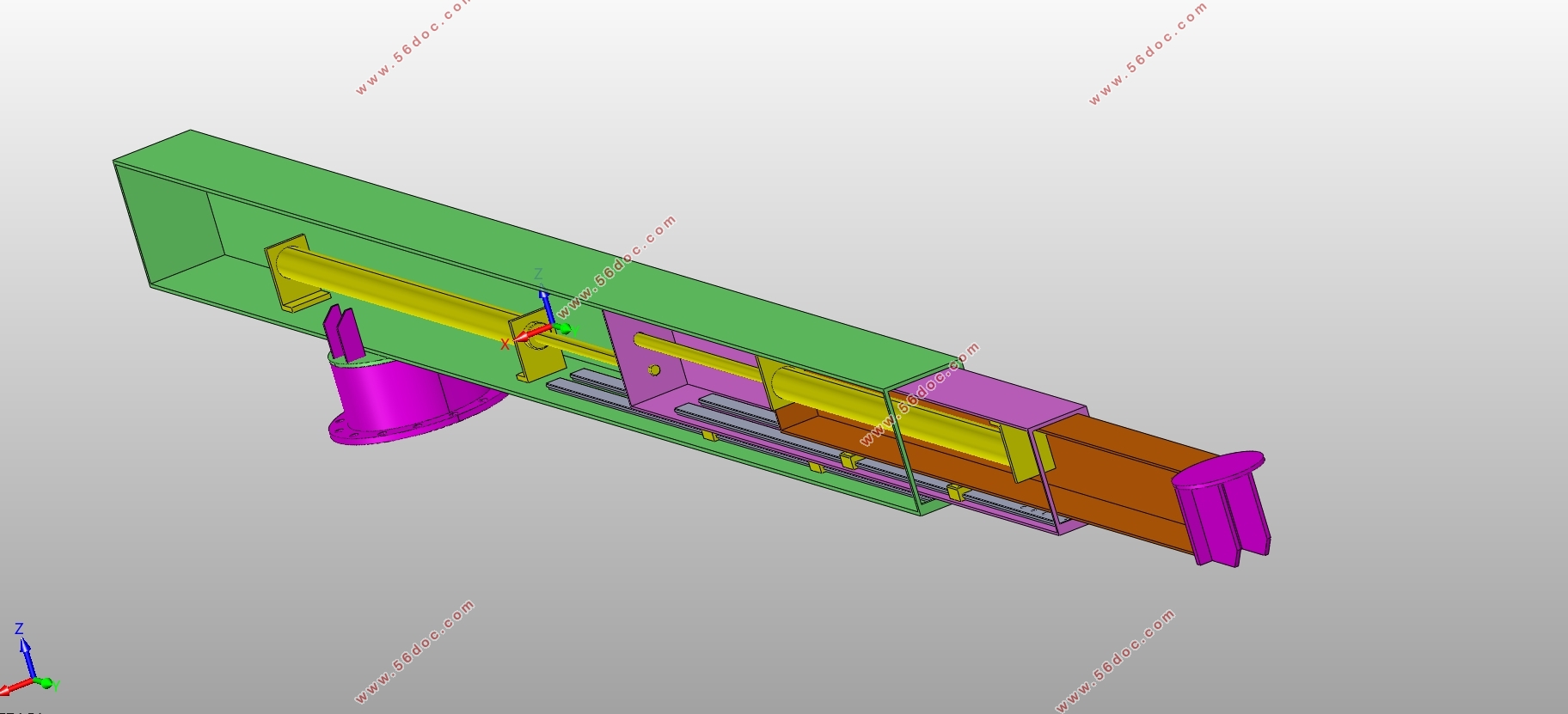
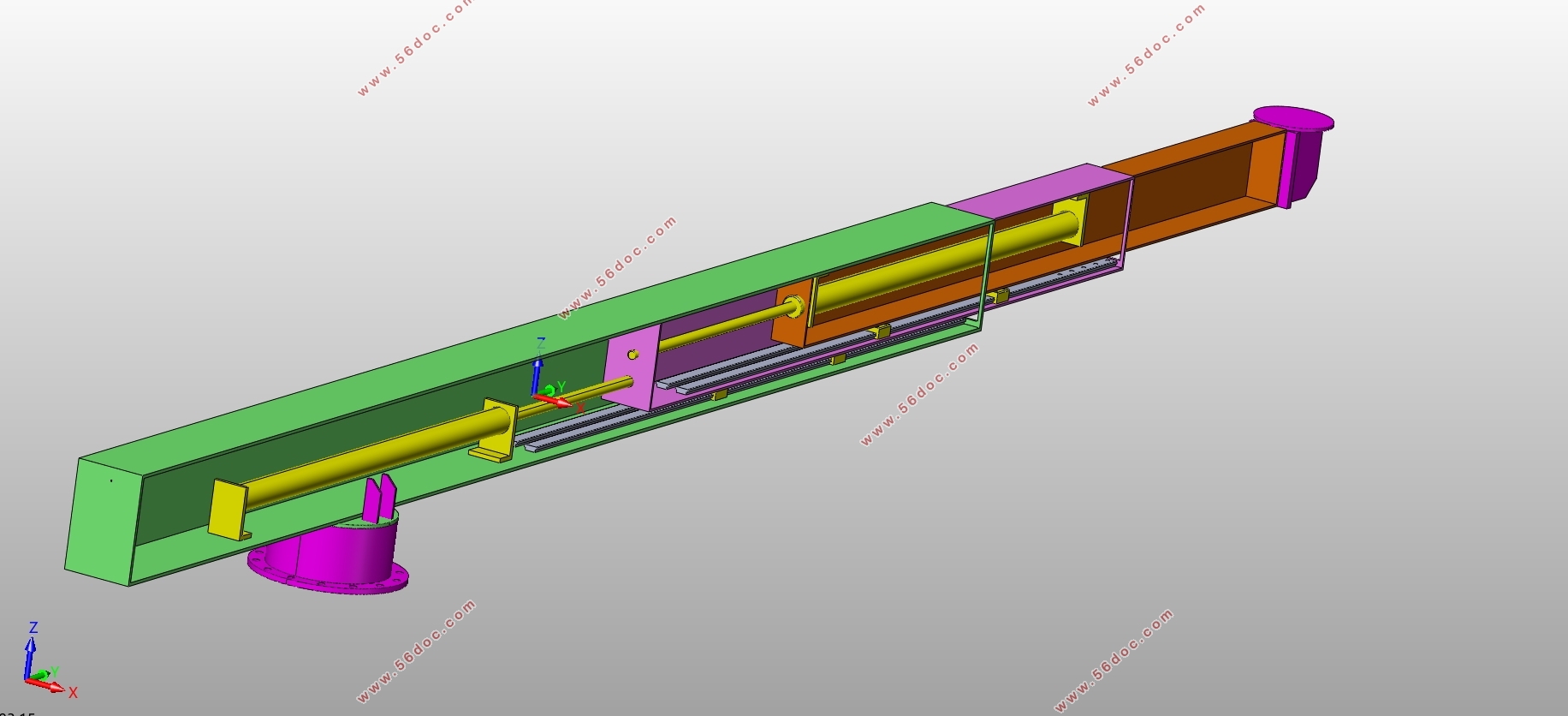
4.2 伸缩臂模型的建立 18
4.2.1 轨道式伸缩臂擦窗机结构简介 18
4.2.2 伸缩臂建模与传统建模方法的区别 19
4.2.3 伸缩臂装配模型 20
4.2.4 伸缩式液压缸 22
总 结 23
参 考 文 献 24
致 谢 25
|