ЫЎЯТЭјвТЧхЯДЛњЦїШЫЕФЩшМЦ(КЌCADСуМўЭМзАХфЭМ)(ПЊЬтБЈИц,ТлЮФЫЕУїЪщ13000зж,CADЭМ9еХ)
еЊ вЊ
КЃбѓ,етИіКИЧСЫЪРНчБэУцЛ§дМЫФЗжжЎШ§ЕФ"РЖЩЋСьЭС",ВЛНідЬКЌзХБШЭСЕиУцЛ§ИќБІЙѓЕФСИЪГЁЂзЪдДКЭПѓВи,ЖјЧвЛЙЮЊПЊеЙжоМЪЛѕЮядЫЪфКЭЗЂеЙОќБИМЦЛЎДДдьзХживЊЕФЭЈЕРЁЃвђДЫдкЪРНчвбОетУДЗБШйЕФНёЬь,зЪдДШДШдШЛЪЧШевцЖЬШБЕФЕБЯТ,ЖдКЃбѓЕФгааЇРћгУШдШЛЪЧШЫРриНД§НтОіЕФПЮЬт,ЃЌЭЌЪБвВЮЊЙњМЪжоМЪЛѕЮядЫЪфКЭОќБИеНТдЬсЙЉСЫБІЙѓЕФЭЈЕРЁЃвђДЫдкЩчЛсШчДЫЗЂДяЕФНёЬьЃЌЪГЮявРШЛЪЧШевцНєШБЕФЕБЯТЃЌЖдКЃбѓЕФПЊЗЂРћгУЪЧШЫРриНД§НтОіЕФЮЪЬтЃЌвВЪЧШЫРрЮЌГжздЩэЗЂеЙЁЂЭиеЙЩњДцПеМфзюЮЊЧаЪЕгааЇЕФЭООЖЁЃЫцзХШЫРрЖдКЃбѓзЪдДПЊЗЂНХВНЕФВЛЖЯМгПьЃЌОпгаКЃбѓПБВтЁЂЛЗОГБЃЛЄЁЂКЃЕзЙмЕРМьВтЁЂКЃбѓОШРЬвдМАЫЎЯТИњзйеьВщЙІФмЕФЫЎЯТЛњЦїШЫвбГЩЮЊЬНЫїПЊЗЂКЃбѓзЪдДКЭНќКЃЗРЮРЕФживЊЪжЖЮЃЌОпгаОоДѓЕФЧБдкМлжЕКЭЙуРЋЕФгІгУЧАОАЁЃБОЮФЪЧеыЖдЩюКЃЭјЯфбјжГаавЕПЊЗЂЕФвЛжжПЩвдЩюКЃЧхНрЭјЯфЕФЛњЦїШЫЁЃетжжЛњЦїШЫПЩвджБНгдкЩюКЃЛЗОГНЋЭјЯфЭтБэУцЕФРЌЛјДђЩЈИЩОЛЃЌУтгкНЋЭјЯфЭЯГіЫЎУцНјааДђЩЈЃЌНкЪЁСЫДѓСПЕФбјжГЪБМфКЭШЫСІГЩБОЁЃ
ЙиМќДЪЃКЩюКЃЃЛЭјЯфЧхЯДЃЛКЃбѓ
ABSTRACT
The ocean, as a "blue territory" covering three-quarters of the earth's surface, not only contains food, energy and minerals that are more abundant than land, but also provides a valuable passage for international intercontinental cargo transportation and armament strategy. Therefore, in today's society is so developed, food is still increasingly scarce, the development and utilization of the ocean is an urgent problem for human beings, and it is also the most practical and effective way for human beings to maintain their own development and expand living space. With the continuous acceleration of human development of marine resources, underwater robots with marine survey, environmental protection, submarine pipeline detection, marine salvage and underwater tracking and reconnaissance functions have become an important means to explore and develop marine resources and offshore defense, with great potential value and broad application prospects. This article is a robot developed for the deep-sea cage farming industry that can clean cages in the deep sea. This robot can directly clean the garbage on the outer surface of the cage in the deep-sea environment, eliminating the need to drag the cage out of the water for cleaning, saving a lot of breeding time and labor costs.
Keywords: deep sea; cage cleaning; ocean
2.1ЩшМЦЛљБОЫМТЗ
ЛљБОЫМТЗЃК
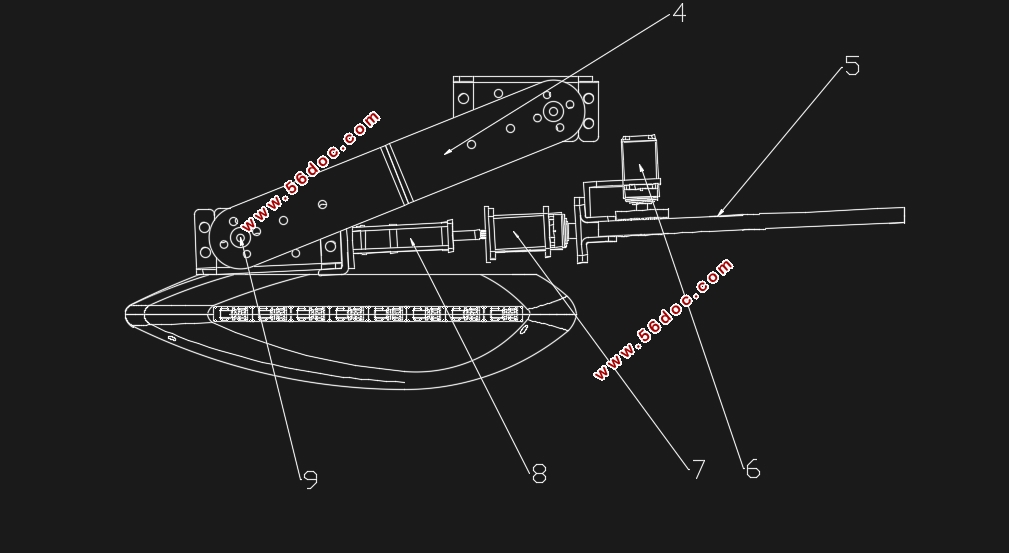
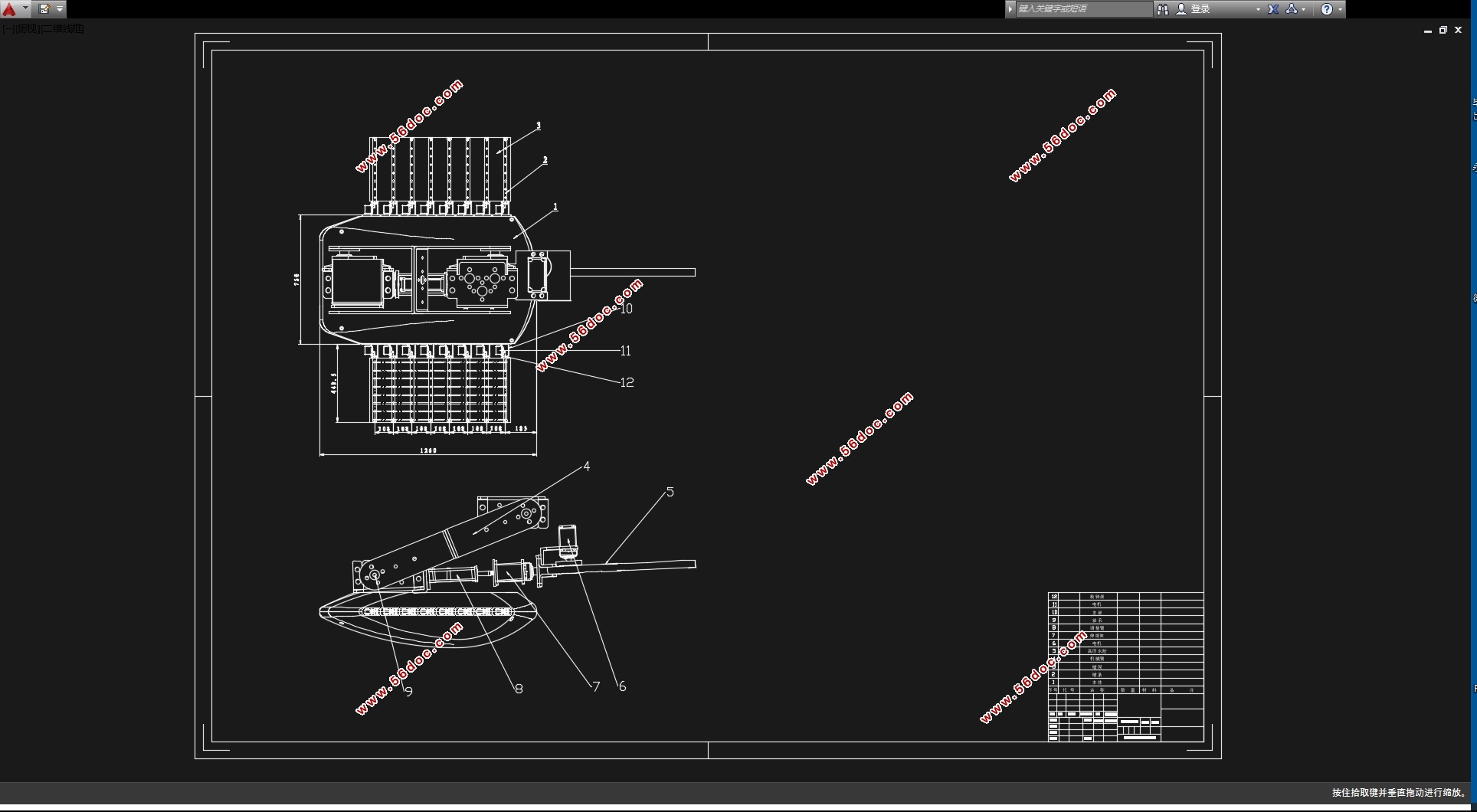
БОДЮЩшМЦЪзЯШДгЩшМЦбјжГЭјвТЧхЯДЛњЦїШЫЕФНсЙЙПЊЪМЃЌжиЕудкгкзЅзЁДЋЖЏЯЕЭГЕФзщГЩНјаабаОПЃЌНјЖјбЁГіЕчЖЏЛњЕФВЮЪ§ЁЃНсЙЙЩшМЦЭъГЩжЎКѓПЊЪМНјааДЋЖЏЗНАИЕФЩшМЦЃЌНјЖјЖдЯрЙиВЮЪ§ПЊЪММЦЫуЃЌИљОнЛњЦїШЫЕФЛљБОВЮЪ§МЦЫуДЋЖЏЯЕЭГИїВПМўЕФЪ§жЕЃЌДгЖјНјааТФДјТжЕФНсЙЙЩшМЦвдМАИїВПМўГпДчЕФбЁдёЃЌаЃКЫЭъМЦЫуЪ§ОнЮоЮѓКѓПЊЪМИљОнМЦЫуЪ§ОнЩшМЦМѕЫйЦїЃЌЩшМЦЭъГЩПЩвдПЊЪМИљОнПижЦашЧѓЩшМЦгВМўЕчТЗЃЌВЂБраДГЬађСїГЬЭМЃЌзюКѓМДПЩЛцжЦЭМжНЁЃ
ПђМмЃКЩшМЦЧхЯДЛњЦїШЫДЋЖЏЯЕЭГЕФНсЙЙЃЈАќРЈЃКДЋЖЏЯЕЭГЕФзщГЩЁЂЕчЛњВЮЪ§ЕФбЁдёЁЂЃЉЃЛЖдЛњаЕДЋЖЏЯЕЭГНјааЩшМЦМЦЫуЃЈАќРЈЃКДЋЖЏЗНАИЕФЩшМЦЁЂЛљБОВЮЪ§ЕФбЁдёЁЂДјТжЕФНсЙЙЩшМЦЁЂМѕЫйЦїЕФЩшМЦМЦЫуЃЉЃЛИљОнбјжГЭјвТПижЦашЧѓЩшМЦгВМўЕчТЗЭМЃЛБраДГЬађСїГЬЭМЁЃ

ФП ТМ
ЕквЛеТ аїТл 5
1.1БОПЮЬтЕФвтвхКЭФПЕФ 5
1.2ЙњФкЭтЗЂеЙЯжзД 6
ЕкЖўеТ змЬхЗНАИЩшМЦ 8
2.1ЩшМЦЛљБОЫМТЗ 8
ЕкШ§еТ дЫЖЏЛњЙЙЕФЩшМЦ 9
3.1дЫЖЏЛњЙЙЕФбЁаЭ 9
3.2дЫЖЏЛњЙЙЕФЩшМЦЗНАИ 9
3.3БОеТаЁНс 12
ЕкЫФеТ ЛњаЕБлЕФЩшМЦ 13
4.1БлВПНсЙЙЩшМЦ 13
4.2ЖцЛњбЁдё 22
Юх ДЋЖЏСуМўЕФЩшМЦМЦЫу 24
5.1 VДјТжДЋЖЏЕФЩшМЦМЦЫу 24
5.2 дВзЖГнТжДЋЖЏЕФЩшМЦМЦЫу 26
5.3 дВжљГнТжДЋЖЏЕФЩшМЦМЦЫу 30
Сљ жсЕФЩшМЦМЦЫу 33
6.1 жїЖЏжсЩшМЦМЦЫу 33
6.2 зЖГнТжЪфГіжсЩшМЦМЦЫу 36
6.3 ЖшТжжсЩшМЦМЦЫу 39
Цп МќСЊНгЕФбЁдёМАМЦЫу 40
7.1 ЕчЛњгыЕчЖЏЛњДјТжСЊНгВЩгУЦНМќСЌНг 41
7.2 жїЖЏжсгыМѕЫйЦїЛњДјТжСЊНгВЩгУЦНМќСЌНг 41
7.3 зЖГнТжЪфГіжсгыаЁдВжљГнТжСЊНгВЩгУЦНМќСЌНг 41
7.4 зЖГнТжЪфГіжсгыДѓзЖГнТжСЊНгВЩгУЦНМќСЌНг 42
АЫ ЙіЖЏжсГаЩшМЦ 43
8.1 жїЖЏжсЕФжсГаЩшМЦМЦЫу 43
8.2 ЪфГіжсЕФжсГаЩшМЦМЦЫу 44
ОХ ДЋЖЏзАжУЕФМЦЫу 46
9.1 ЕчЖЏЛњЕФбЁдё 46
9.1.1 ЕчЖЏЛњЕФРраЭКЭНсЙЙЗжЮі 46
9.1.2 бЁдёЕчЖЏЛњЕФЙІТЪ 46
9.1.3 ШЗЖЈЕчЖЏЛњЕФзЊЫй 47
жТ аЛ 50
ВЮПМЮФЯз 51
|
