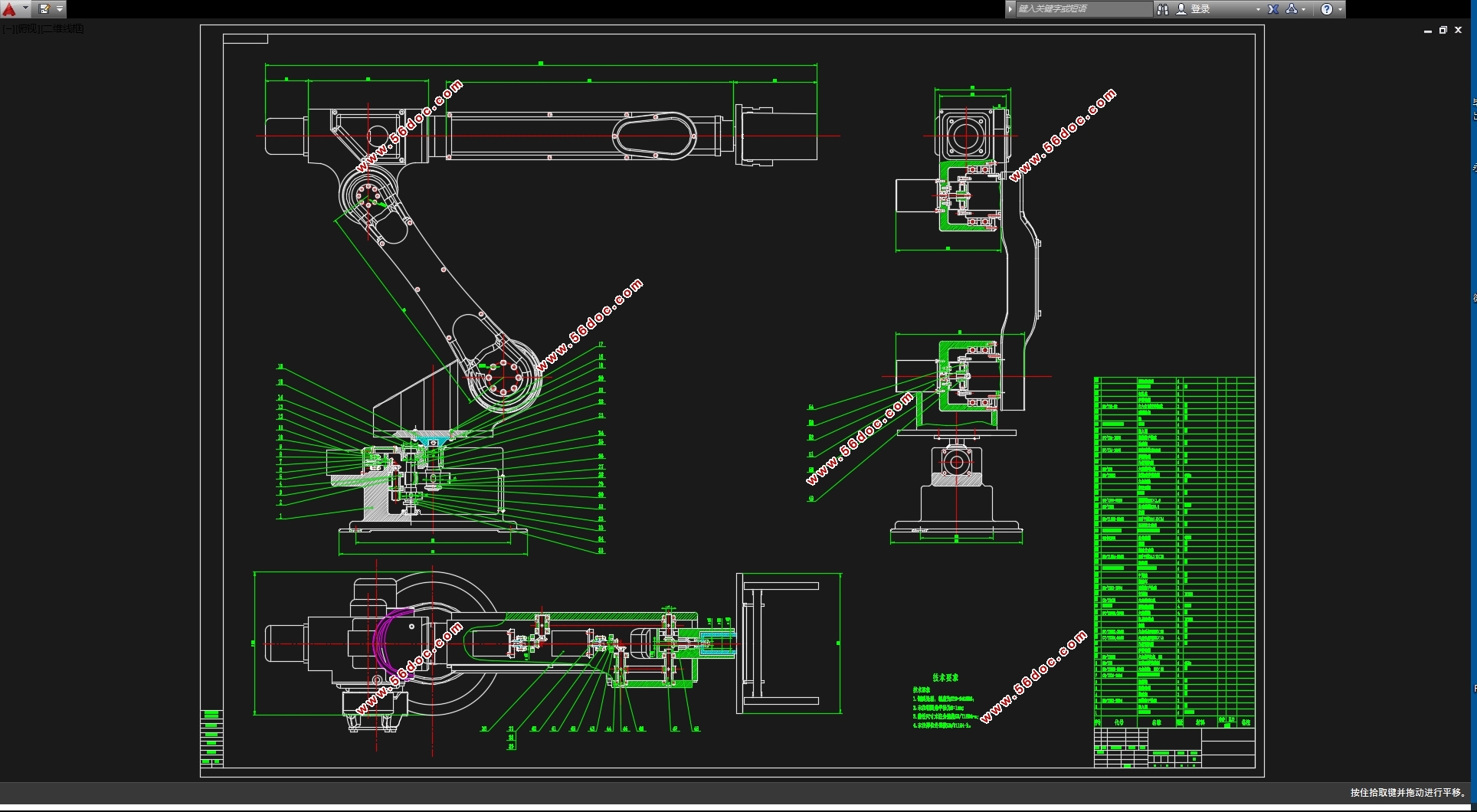
ЕЅБлЪНзАаЖЛњЦїШЫЕФЩшМЦ(КЌCADСуМўЭМзАХфЭМ)(ТлЮФЫЕУїЪщ10900зж,CADЭМ7еХ)
еЊвЊ
НќМИЪЎФъРДЃЌзАаЖЛњЦїШЫзїЮЊИпПЦММздЖЏЛЏЩњВњЩшБИжЎвЛЃЌГЩЮЊЙЄвЕЛњЦїШЫЕФвЛИіживЊЗжжЇЁЃЦфЭЈЙ§БрГЬЪЕЯжИїжждЄЦкзївЕЃЌМцОпШЫКЭЛњЦїЕФгХЕуЃЌгШЦфЬхЯждкШЫЕФжЧФмКЭЪЪгІадЩЯЁЃЛњЦїШЫзМШЗадКЭЭъГЩзївЕЕФЛЗОГЪЪгІадЃЌгЕгаЙуЗКЕФЙњУёОМУЗЂеЙПеМфЁЃЖјЗЂеЙзАаЖЛњЦїШЫЕФФПЕФЪЧЮЊСЫДгжиИДЁЂЗБжиЕФЬхСІРЭЖЏжаНтЗХГіШЫСІЁЃ
БОЮФЭЈЙ§ЩшЖЈЯжгаВЮЪ§ЃЌНјааЖрИіЗНАИЖдБШЃЌЩшМЦГівЛПюзАаЖЕЅБлЕФЛњаЕЪжЁЃДЫЭтЃЌДѓСІЗЂеЙзАаЖЛњаЕгаЙуРЋЕФЧАОАЁЃЛњЦїШЫЕФЛ§МЋзїгУАќРЈЃКВПЗжДњЬцШЫЙЄВйзї;ИљОнЩњВњЙЄвеЕФвЊЧѓЃЌАДеевЛЖЈЕФГЬађЁЂЪБМфЁЂЮЛжУЭъГЩЙЄМўЕФАсдЫКЭзАаЖ;ВйзїКИНгЁЂзАХфЫљашЕФЛњОпЃЌгХЛЏЙЄШЫРЭЖЏЬѕМўЃЌЯджјЬсИпРЭЖЏЩњВњТЪЃЌМгПьЙЄвЕЩњВњЛњаЕЛЏЁЂздЖЏЛЏЕФВНЗЅЁЃвђДЫЃЌаэЖрЙњМвЖМжиЪгЫќЃЌЭЖШыСЫДѓСПЕФШЫСІЮяСІНјаабаОПКЭгІгУЁЃзАаЖЛњЦїШЫгШЦфдкИпЮТЁЂИпбЙЁЂЗлГОЁЂдыЩљЁЂЗХЩфадКЭЮлШОГЁКЯОпгаЙуЗКЕФгІгУМлжЕЁЃ
ЙиМќДЪЃКзАаЖЛњаЕЪжЩшМЦ
ABSTRACT
In recent decades, as one of the high-tech automated production equipment, the loading and unloading robots have become an important branch of industrial robots. They achieve various expected operations through programming and embody the advantages of both humans and machines, especially in intelligence and adaptability. With high accuracy and environmental adaptability, robots have broad space for development in national economy. The purpose of developing loading and unloading robots is to free people from repetitive and strenuous physical labor.
This article compares multiple schemes by setting current parameters and designs a single-arm mechanical hand for loading and unloading. In addition, developing loading and unloading machinery has broad prospects. The positive effects of robots include partial replacement of manual operations, fulfilling the requirements of production processes by following certain procedures, time and positions to complete the transportation and loading and unloading of workpieces, operating necessary tools for welding and assembly to optimize labor conditions, and significantly improving labor productivity, accelerating the industrial automation and mechanization. Therefore, many countries have attached great importance to it and invested a lot of human and material resources in researching and applying it. Loading and unloading robots have a wide range of application values, particularly in fields such as high temperature, high pressure, dust, noise, radiation and pollution.
Keywords: Handling Manipulator Design
БОЮФЕФбаОПФкШнЪЧгаЙиЕЅБлзАаЖЛњЦїЪжЕФЩшМЦЁЃФПЧАЃЌЙњФкЦћГЕаавЕЕФзмзАЯпвбОЛљБОЪЕЯжСЫЙцФЃЛЏКЭЛњаЕЛЏЩњВњЃЌздЖЏЛЏЫЎЦНвВЯрЖдНЯИпЁЃБОЮФЩшМЦЕФЛњЦїЪжЪЧвЛжжгУгкЦћГЕаавЕЕФзАаЖЛњЦїШЫЁЃ
ЩшМЦВЮЪ§ВЮПМ:
ЕЅБлзАаЖ:ВЮПМГЃЙцдкЯпАсдЫЕЅБлГпДч:3000mm*600mm*150mm;
зюДѓАсдЫжиСП:500kgЃЛ

ФПТМ
еЊвЊ 1
ABSTRACT 2
вЛЁЂаїТл 4
1.1 в§бд 4
1.2ЙњФкЭтбаОПЯжзД 4
1.3БОЮФбаОПЕФжївЊФкШн 5
ЖўЁЂзмЬхЗНАИЩшМЦ 6
2.1 Ъ§ОнВЮПМ 6
2.2ЁЂзмЗНАИТлЪі 6
2.3 НсЙЙгыДЋЖЏдРэ 7
2.4 змЬхЗНАИЩшМЦ 7
Ш§зАаЖЛњЦїШЫДѓБлЕФНсЙЙЩшМЦ 8
3.1 ЩшМЦЛљБОвЊЧѓ 8
3.2 ЛњЙЙЩшМЦ 8
3.3 Ч§ЖЏЯЕЭГбЁаЭ 9
3.4 ГадиФмСІМЦЫу 9
ЫФЁЂзАаЖЛњЦїШЫФЉЖЫНсЙЙЩшМЦ 12
4.1 НсЙЙЩшМЦгыаЃКЫ 12
4.2 МЦЫуЗжЮі 20
4.3 ДЋЖЏжсЕФЩшМЦ 21
ЮхЁЂЛњЩэНсЙЙЕФЩшМЦ 24
5.1 ГнТжЩшМЦ 24
5.2 жсЕФЩшМЦ 27
5.3 жсГааЃКЫ 34
СљЁЂзмНс 39
ЦпЁЂжТаЛ 40
АЫЁЂВЮПМЮФЯз 41
|
