煤矿自动钻孔机半自动快速装卸杆装置设计
来源:56doc.com 资料编号:5D3914 资料等级:★★★★★ %E8%B5%84%E6%96%99%E7%BC%96%E5%8F%B7%EF%BC%9A5D3914
资料以网页介绍的为准,下载后不会有水印.资料仅供学习参考之用. 密 保 惠 帮助
资料介绍
摘要
在煤矿开采过程中,瓦斯的控制及排放是关系到煤矿安全的极其重要的问题,很多时候都需要对尚未开采的煤矿中的瓦斯进行钻孔排放。钻孔效率取决于钻杆钻进的时间以及装卸钻杆等方面的辅助工作时间。一般钻孔深度深达几十米甚至上百米,而每节钻杆的长度只有0.8米,因此钻杆在钻进和退出的时候分别要进行大量的装钻杆和卸钻杆的重复工作。
目前装卸钻杆大多采用人工操作,劳动强度大、效率低。所以设计一种半自动快速装卸钻杆装置实现装卸钻杆的半自动化,将大大缩短安装钻杆需要的时间,提高钻孔效率,同时也可以减少人工装卸钻杆造成的安全事故。
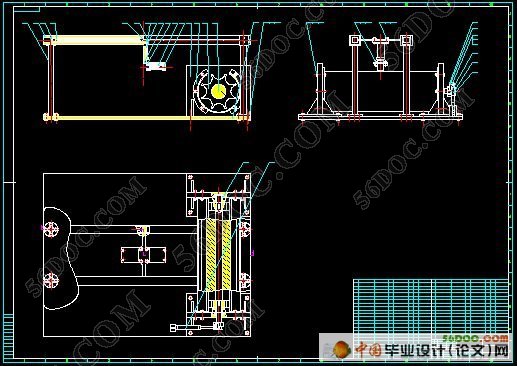
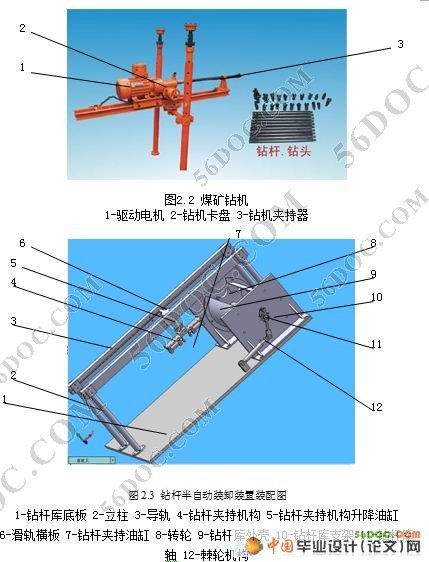
本文介绍了一种半自动钻杆装卸装置,该装置由钻杆库、钻杆转移装置两部分组成。钻杆库用来存放钻杆,同时钻杆库上装有棘轮定位装置,可以实现钻杆库的转动并准确定位以辅助钻杆转移装置抓取钻杆;钻杆转移装置则将钻杆从钻杆库转移到钻杆的安装位置并辅助安装。所有的控制都通过液压控制实现。
关键词:半自动装卸钻杆,钻杆库,钻杆转移装置,液压控制
ABSTRACT
In the course of coal mining, gas control and emissions which are related to mine safety is extremely important issues, and it is usually need to let the gas out of coal mine which has not been mining by drilling.
Drilling efficiency depends on the drilling time of drill pipe, as well as assistant working hours of loading and unloading drill pipe. General drilling depth is tens of meters or even hundreds meters, whereas the length of each drill pipe is only 0.8 meters, so a lot repeat works of loading and unloading drill pipe must be done when the drill pipe infix and exit.
Most of the current work of loading and unloading drill pipe is manual, labor-intensive and low efficiency. Therefore, the design of a semi-automatic loading and unloading drill pipe device to achieve semi-automatic will greatly shorten the time needed to the installation of drill pipe and improve the efficiency of drilling, at the same time ,it can also reduce the security accident caused by manual handling of the drill pipe.
In this paper, a semi-automatic loading and unloading devices of drill pipe is introduced which is composed of the drill pipe warehouse ane ane drill pipe transfer device. The drill pipe warehouse is used to store the drill pipe, and the drill pipe warehouse is equipped with ratchet positioning devices, so the drill pipe warehouse can rotate and go to the accurate positioning to support the transfer equipment to crawl drill pipe; So the transfer equipment can transferre drill pipe from the drill pipe warehouse to the installation place of drill pipe and assist to installation. All are controlled by hydraulic control .
Key words: semi-automatic loading and unloading drill pipe, drill pipe warehouse,transfer device of drill pipe, hydraulic control
本文结构安排
本文绪论部分主要介绍了本课题设计的目的,以及国内外自动装卸钻杆的现状。第二章着重讲钻杆装卸装置方案的设计,以及一些自制件的介绍。第三章为钻杆装卸装置的动力计算和安全校核部分。第四章为钻杆装卸装置的液压控制回路设计。第五章为总结与展望,指出了设计的不足之处和今后的努力方向。
目前,在工程应用中,钻杆的装卸一般靠人工完成。人工安装危险系数比较大,稍有不慎,钻杆就会落地,可能造成操作者受伤。同时,由于钻进一根钻杆只需要几分钟,所以操作者必须时刻呆在钻机旁边,劳动强度比较大,效率也比较低。而且井下的环境比较恶劣,会对操作者的健康造成危害,所以在设计钻杆自动装卸机构的时候就要考虑这些问题,以实现不需要人力就可以实现钻杆的装卸任务。出于这些考虑,所设计的钻杆自动装卸装置包含两大部分:钻杆库和钻杆转移装置。其中钻杆库用来存放需要的钻杆,以满足钻机钻进的需要。钻杆转移装置用来把钻杆从钻杆库转移到钻杆的安装位置,并辅助钻机进行钻杆的安装,所有的动作的实现都是靠液压控制自动实现的,需要人操作的部分就是在钻杆库里的钻杆用完的时候,向钻杆库中添加钻杆。
目 录 15000字
中文摘要 Ⅰ
ABSTRACT Ⅱ
1绪论 1
1.1 课题设计的目的和意义 1
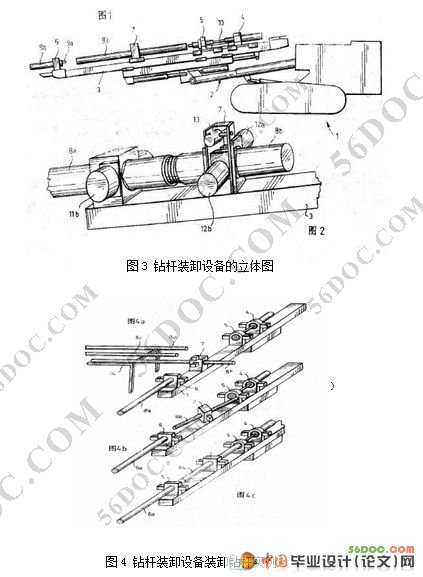
1.2 钻杆半自动装卸的现状 1
1.3 本文结构安排 5
2 钻杆半自动装卸装置方案设计 6
2.1 引言 6
2.2 钻杆装卸原理 6
2.2.1 ZDY-500/85全液压钻机主要技术参数简介 7
2.2.2 钻杆简介 7
2.2.3 钻杆装卸原理 7
2.3 钻杆半自动装卸装置方案设计 8
2.3.1 引言 8
2.3.2 钻杆库设计 10
2.3.3 钻杆转移装置设计 15
2.4 本章总结 21
3 钻杆半自动装卸装置的动力计算及强度校核 22
3.1 引言 22
3.2 钻杆半自动装卸装置的动力计算 22
3.2.1 棘轮油缸的动力计算 22
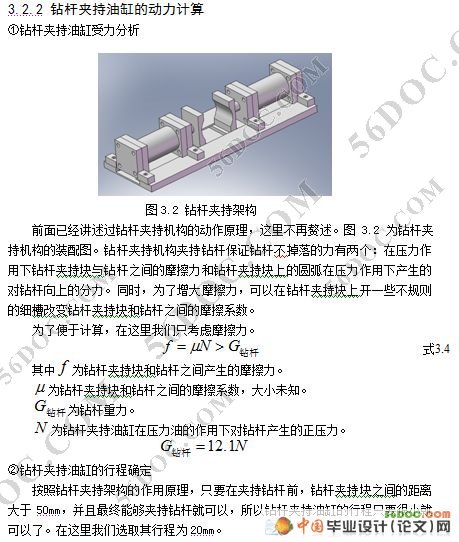
3.2.2 钻杆夹持油缸的动力计算 24
3.2.3 提升油缸的动力计算 25
3.2.4 导轨油缸的动力计算 26
3.3 钻杆半自动装卸装置的强度校核 26
3.3.1 立柱的强度校核 26
3.3.2 横板的强度校核 29
3.4 本章小结 30
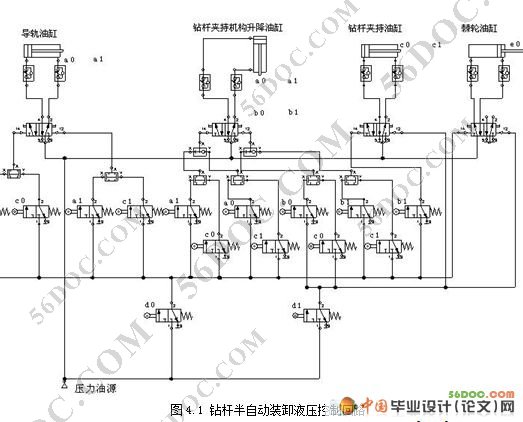
4 钻杆半自动装卸装置的液压控制回路设计 31
4.1 引言 31
4.2 钻杆半自动装卸装置液压控制回路设计 31
4.2.1 引言 31
4.2.2钻杆半自动装卸装置液压控制回路设计 32
4.3 本章小结 34
5 总结与展望 35
参考文献
包含 任务书,开题报告,外文翻译
|