ЙмЕРГ§ГОЛњЦїШЫНсЙЙЩшМЦЕФбаОП
РДдДЃК56doc.com зЪСЯБрКХЃК5D8194 зЪСЯЕШМЖЃКЁяЁяЁяЁяЁя %E8%B5%84%E6%96%99%E7%BC%96%E5%8F%B7%EF%BC%9A5D8194
зЪСЯвдЭјвГНщЩмЕФЮЊзМ,ЯТдиКѓВЛЛсгаЫЎгЁ.зЪСЯНіЙЉбЇЯАВЮПМжЎгУ. Ум БЃ Лн Аяжњ
зЪСЯНщЩм
ЙмЕРГ§ГОЛњЦїШЫНсЙЙЩшМЦЕФбаОП(КЌШЮЮёЪщ,ПЊЬтБЈИц,ЭтЮФЗвы,БЯвЕТлЮФЫЕУїЪщ16000зж,НјЖШМьВщБэ,CADЭМжН10еХ)
еЊ вЊ
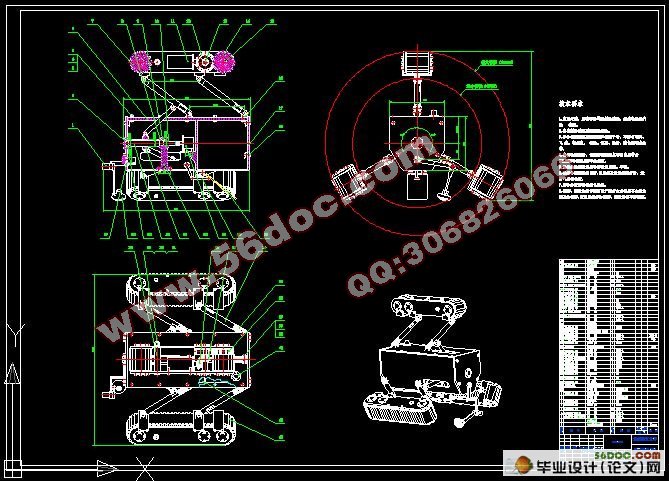
ЛљгкРћгУаааЧФЅЭЗЧхЯДММЪѕЖдЙмЕРНјааЧхЯДЕФФПЕФЃЌдкзмНсЯжгаЕФЙмЕРЛњЦїШЫЩшМЦЗНАИЕФЛљДЁЩЯЃЌИљОнЯжГЁЕФЪЕМЪЧщПіЃЌТлЮФЪзЯШЖдЙмЕРЧхЯДЛњЦїШЫаазпВПЗжНјааЗНАИЩшМЦЃЌОЗжЮіБШНЯКѓШЗЖЈСЫаТаЭЙмЕРЧхЯДЛњЦїШЫаазпЕФНЯМбЩшМЦЗНАИЃЌВЂОнДЫЗНАИЖдЛњЦїШЫзїСЫаазпВПЗжНсЙЙЩшМЦ;ЖдЛњЦїШЫЕФаазпЬиадНјааСЫбаОПЃЌЬсГіСЫЪЙЛњЦїШЫдкЙмЕРФкФмЙЛБЃГжЮШЖЈдЫааЕФЗНЗЈ.ЭЈЙ§ЖдЛњЦїШЫЛњЙЙЕФЩшМЦКЭЛњЦїШЫдкжБЙмЕРФкдЫЖЏЧщПіЕФЫМПМбаОПЃЌНјвЛВНбщжЄСЫЩшМЦЫМЯыЕФПЩааадЁЃ
зюКѓЃЌбаОПСЫЙмЕРЧхЯДЛњЦїШЫаазпЯЕЭГЕФАВШЋадФмЃЌИјГіСЫдкИпбЙЧщПіЯТБЃжЄаазпЯЕЭГАВШЋЕФЛљБОЗНАИЃЌЮЊЙмЕРЧхЯДЛњЦїШЫЯЕЭГЕФЪЕгУЛЏЬсЙЉПЩППЕФвРОнЁЃ
ЙиМќДЪ: ЙмЕРЛњЦїШЫЃЛАВШЋЗРЛЄ ЃЛаазп
Abstract
Based on the use of planetary grinding head cleaning technology for the purpose of cleaning pipes, at the conclusion of the existing pipeline robot design based on the actual situation at the scene, the first paper on the pipe cleaning robot to walk part of program design, by analysis and comparison a new pipeline after cleaning robot designed to walk a better program, and accordingly the program made a walk on part of the structure of robot design; characteristics of walking robots have been studied and put forward in the pipeline so that the robot was able to remain stable The method of operation. By the design of the robot body and the robot movement in the straight tube case study of thinking, and further verify the feasibility of the design idea.
Finally, the research pipeline cleaning robot running the safety of the system performance, given the high-pressure circumstances to ensure that the basic operating system security program, for pipe cleaning robot system of the utility to provide a reliable basis.
Key words: pipe robot; security; walk
1.3 ЛљБОЩшМЦШЮЮё
1.3.1 ЩшМЦЬтФПЃКЙмЕРЧхЯДЛњЦїШЫаазпВПМўЕФЩшМЦ
1.3.2 ШЮЮёЃК 1. ЩшМЦЁЂМЦЫуЮаТжКЭСДТжЛњЙЙЃЛ
2. ЩшМЦДЋЖЏНсЙЙдьаЭЃЛ
3. гУМЦЫуЛњЛцжЦзАХфЭМКЭжївЊСуМўЭМЃЛ
4. АДжИЖЈИёЪНКЭвЊЧѓзЋаДБЯвЕЩшМЦМЦЫуЫЕУїЪщ
1.4 БЯвЕЩшМЦЕФФПЕФ
БЯвЕЩшМЦЪЧЖдбЇЩњНјааЙЄГЬЪІЛљБОбЕСЗЕФживЊЛЗНкЃЌЭЈЙ§БЯвЕЩшМЦФмДяЕНвдЯТФПЕФЁЃ
ЁД1ЁЕ ЙЎЙЬ.ЪьЯЄВЂзлКЯдЫгУЫљбЇЕФжЊЪЖЃЛ
ЁД2ЁЕ ХрбјРэТлСЊЯЕЪЕМЪЕФбЇЗчЃЛ
ЁД3ЁЕ ЪьЯЄНјааЛњаЕЩшМЦЕФвЛАуВНжшКЭГЃМћЮЪЬтЃЌеЦЮеЛњаЕЩшМЦЕФвЛАуММЧЩЁЃ
ЁД4ЁЕ бЇЛсВщдФдЫгУММЪѕзЪСЯЃЛГѕВНеЦЮеЖдзЈвЕЗЖЮЇФкЕФЩњВњММЪѕЮЪЬтНјаабаОПЕФФмСІЁЃ

ФПТМ
еЊ вЊ III
ABSTRACT IV
аїТл 1
1 ИХЪі 2
1.1 ЙмЕРЧхЯДЛњЦїШЫГЃМћЮЪЬтЗжЮі 2
1.2 Г§ЙИЛњЦїШЫРэФю 2
1.3 ЛљБОЩшМЦШЮЮё 3
1.4БЯвЕЩшМЦЕФФПЕФ 3
2.1 ЙмЕРЩфСїЧхЯДЛњЦїШЫЕФБОЬхЩшМЦ 4
2.1.1 вЦЖЏЗНЪНбЁдё 4
2.1.2 ДЋЖЏЗНАИЕФбЁдё 4
2.2 ЙмЕРЧхЯДЛњЦїШЫБфЙмОЖздЪЪгІадЗНАИЩшМЦ 6
2.3 ЖЏСІЯЕЭГЕФЩшМЦМЦЫу 9
2.3.1 ЙмЕРЛњЦїШЫааЪЛзшСІЗжЮі 9
2.3.2 МѕЫйЦїЕФбЁдё 12
2.4 ЛњЦїШЫЕФЫйЖШКЭЧ§ЖЏФмСІаЃКЫ 13
2.4.1 дЫЖЏЫйЖШаЃКЫ 13
2.4.2 Ч§ЖЏФмСІаЃКЫ 13
3 СДТжДЋЖЏЕФЩшМЦМЦЫу 14
3.1 СДТжЩшМЦЕФГѕЪМЬѕМў 15
3.2 СДТжМЦЫуНсЙћ 15
3.3РњЪЗНсЙћ 16
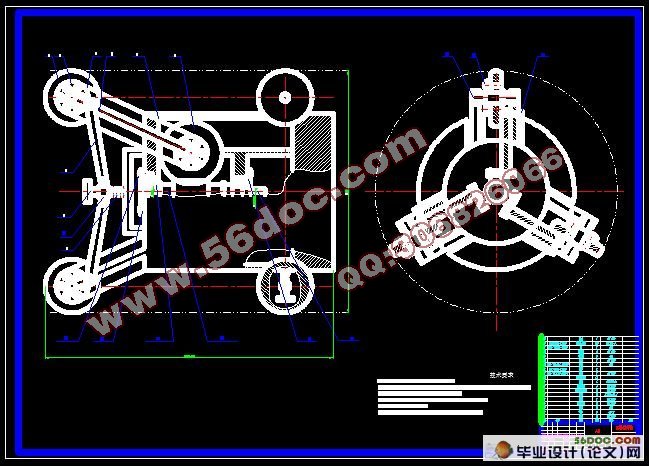
4 ЮЯТжЮЯИЫЕФЩшМЦМЦЫу 18
4.1 ЮЯТжЮЯИЫЛљБОВЮЪ§ЩшМЦ 18
4.1.1 ЦеЭЈЮЯИЫЩшМЦЪфШыВЮЪ§ 18
4.1.2 ВФСЯМАШШДІРэ 19
4.1.3 ЮЯИЫЮЯТжЛљБОВЮЪ§ 20
4.1.4 ЮЯЮЯТжОЋЖШ 21
4.1.5 ЧПЖШИеЖШаЃКЫНсЙћКЭВЮЪ§ 22
4.1.6 здШЛЭЈЗчЩЂШШМЦЫу 22
4.2ЮЯИЫжсЕФНсЙЙЩшМЦ 23
4.2.1 жсЕФЧПЖШНЯКЫМЦЫу 23
4.2.2 жсЕФНсЙЙЩшМЦ 24
4.2.3 МќЕФаЃКЫ 25
5 ЕЏЛЩЕФЩшМЦМЦЫу 25
6 АВШЋадФм 26
НсТл 27
ВЮПМЮФЯз 28
жТаЛ 30
ЮЯИЫЩшМЦВЮЪ§
1. ДЋЕнЙІТЪ P 0.38 (kW)
2. ЮЯИЫзЊОи T1 2.49(N.m)
3. ЮЯТжзЊОи T2 36.69 (N.m)
4. ЮЯИЫзЊЫй n1 125.00 (r/min)
5. ЮЯТжзЊЫй n2 6.25 (r/min)
6. РэТлДЋЖЏБШ i 20.00
7. ЪЕМЪДЋЖЏБШ i' 20.00
8. ДЋЖЏБШЮѓВю 0.00 (ЃЅ)
9. дЄЖЈЪйУќ H 4800 (аЁЪБ)
10. дЖЏЛњРрБ№ ЕчЖЏЛњ
11. ЙЄзїЛњдиКЩЬиад ЦН ЮШ
12. ШѓЛЌЗНЪН ХчгЭ
13. ЮЯИЫРраЭ НЅПЊЯпЮЯИЫ
14. ЪмдиВрУц 3Вр
4.1.2 ВФСЯМАШШДІРэ
1. ЮЯИЫВФСЯХЦКХ 45(БэУцДуЛ№)
2. ЮЯИЫШШДІРэ БэУцДуЛ№
3. ЮЯИЫВФСЯгВЖШ HRC45ЁЋ55
4. ЮЯИЫВФСЯГнУцДжВкЖШ 1.6ЁЋ0.8 (μm)
ЖдЮЯТжЮЯИЫОЋЖШЕШМЖЮвУЧЖМбЁЮЊ8МЋЕУГіЃК
5. ЮЯТжВФСЯХЦКХМАж§дьЗНЗЈ ZCuSn10P1(ЩАФЃ)
6. ЮЯТжВФСЯаэгУНгДЅгІСІ[σ]H' 200 (N/mm^2)
7. ЮЯТжВФСЯаэгУНгДЅгІСІ[σ]H 200 (N/mm^2)
8. ЮЯТжВФСЯаэгУЭфЧњгІСІ[σ]F' 32 (N/mm^2)
9. ЮЯТжВФСЯаэгУЭфЧњгІСІ[σ]F 30 (N/mm^2)
ЮЯИЫЮЯТжЩшМЦВЮЪ§
1. ЮЯИЫЭЗЪ§ z1 2
2. ЮЯТжГнЪ§ z2 40
3. ФЃ Ъ§ m 3.15 (mm)
4. ЗЈУцФЃЪ§ Mn 3.10 (mm)
5. ЮЯИЫЗжЖШдВжБОЖ d1 35.50 (mm)
6. жааФОр A 63.00 (mm)
7. ЮЯИЫЕМГЬНЧ γ 10.063°
8. ЮЯТжЕБСПГнЪ§ Zv2 41.90
9. ЮЯТжБфЮЛЯЕЪ§ x2 -5.63
10. жсЯђГнаЮНЧ αx 20.287°
11. ЗЈЯђГнаЮНЧ αn 20.000°
12. ГнЖЅИпЯЕЪ§ ha* 1.00
13. ЖЅЯЖЯЕЪ§ c* 0.20
14. ЮЯИЫГнПэ b1 ≥ 65.00 (mm)
15. ЮЯТжГнПэ b2 ≤ 24.00 (mm)
16. ЪЧЗёФЅЯїМгЙЄ Зё
17. ЮЯИЫжсЯђГнОр px 9.90 (mm)
18. ЮЯИЫГнЖЅИп ha1 3.15 (mm)
19. ЮЯИЫЖЅЯЖ c1 0.63 (mm)
20. ЮЯИЫГнИљИп hf1 3.78 (mm)
21. ЮЯИЫГнИп h1 6.93 (mm)
22. ЮЯИЫГнЖЅдВжБОЖ da1 41.80 (mm)
23. ЮЯИЫГнИљдВжБОЖ df1 27.94 (mm)
24. НЅПЊЯпЮЯИЫЛљдВжБОЖ db1 15.36 (mm)
25. НЅПЊЯпЮЯИЫЛљдВЕМГЬНЧ γb1 22.296°
26. ЮЯТжЗжЖШдВжБОЖ d2 126.00 (mm)
27. ЮЯТжКэдВжБОЖ da2 96.80 (mm)
28. ЮЯТжГнИљдВжБОЖ df2 82.94 (mm)
29. ЮЯТжГнЖЅИп ha2 -14.60 (mm)
30. ЮЯТжГнИљИп hf2 21.53 (mm)
31. ЮЯТжГнИп h2 6.93 (mm)
32. ЮЯТжЭтдВжБОЖ de2 ≤ 101.52 (mm)
33. ЮЯТжГнЖЅдВЛЁАыОЖ Ra2 14.60 (mm)
34. ЮЯТжГнИљдВЛЁАыОЖ Rf2 21.53 (mm)
35. ЮЯИЫжсЯђГнКё sx1 4.95 (mm)
36. ЮЯИЫЗЈЯђГнКё sn1 4.87 (mm)
37. ЮЯТжЗжЖШдВГнКё s2 -8.18 (mm)
38. ЮЯИЫГнКёВтСПИпЖШ ha1' 3.15 (mm)
39. ЮЯИЫНкдВжБОЖ d1' -0.00 (mm)
40. ЮЯТжНкдВжБОЖ d2' 126.00 (mm)
|
