动态优化的一种新型高速,高精度的三自由度机械手
来源:56doc.com 资料编号:5D5236 资料等级:★★★★★ %E8%B5%84%E6%96%99%E7%BC%96%E5%8F%B7%EF%BC%9A5D5236
资料以网页介绍的为准,下载后不会有水印.资料仅供学习参考之用. 密 保 惠 帮助
资料介绍
动态优化的一种新型高速,高精度的三自由度机械手(中文4200字+外文pdf)
摘要
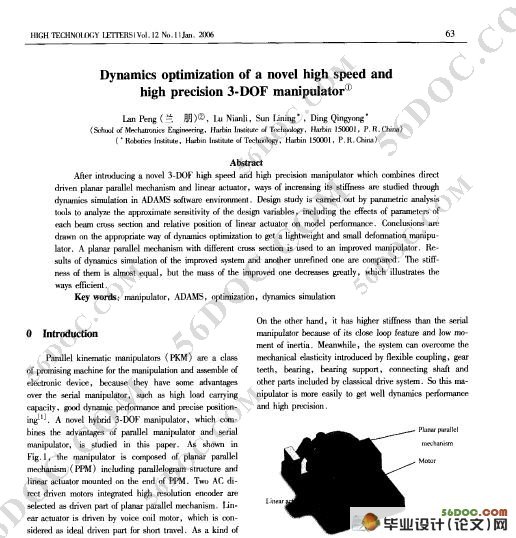
介绍了一种动态优化三自由度高速、高精度相结合,直接驱动臂平面并联机构和线性驱动器,它可以提高其刚度进行了动力学分析软件ADAMS仿真模拟环境中,进行仿真模拟实验.设计调查是由参数分析工具完成处理的,分析了设计变量的近似的敏感性,包括影响参数的每道光束截面和相对位置的线性驱动器上的性能.在适当的方式下,模型可以获得一个轻量级动态优化和小变形的参数。一个平面并联机构不同截面是用来改进机械手的.结果发生明显的改进后的系统动力学仿真分析和另一个未精制一个几乎是几乎相等.但刚度的改进的质量大大降低,说明这种方法更为有效的。
关键词: 机械手、 ADAMS、 优化、 动力学仿真
|