端到端车道检测:实例分割方法
来源:56doc.com 资料编号:5D23578 资料等级:★★★★★ %E8%B5%84%E6%96%99%E7%BC%96%E5%8F%B7%EF%BC%9A5D23578
资料以网页介绍的为准,下载后不会有水印.资料仅供学习参考之用. 密 保 惠 帮助
资料介绍
端到端车道检测:实例分割方法(中文7000字,英文PDF)
摘要
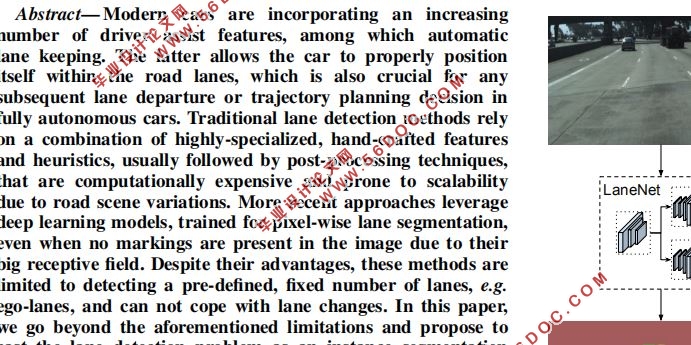
现代汽车结合了越来越多的驾驶员辅助功能,包括自动车道保持。自动车道保持允许汽车在道路车道内正确定位,这对于完全自主汽车的后续车道偏离或轨迹规划决策也是至关重要的。传统车道检测方法依赖于高度专业的手工特征标记和后处理启发式算法的组合,这些技术计算代价高,并且由于道路现场变化而易于扩展。最近有研究利用深度学习模型来进行像素级车道分割训练,也可以用于图像由于较大的接收范围而没有标记的情况。尽管有其优点,但这些方法仅限于检测预先定义固定数量的车道,并且不能应对车道变化。
在本文中,我们超越了上述限制,提出将车道检测问题看作一个实例分割问题(其中每个车道都形成自己的实例)可以进行端到端的训练。为了在拟合车道前对分段的车道实例进行参数化,我们应用了一个以图像为条件的透视变换(不适用于固定的“鸟瞰”变换),这样,我们确保了一种对道路变化具有鲁棒性的车道匹配,不像现有的依靠固定、预定义转换的方法。总之,我们提出了一种快速车道检测算法,运行速度为50帧/秒,可以处理不同数量的车道并应对车道变化。我们在tuSimple数据集上验证了我们的方法并获得了不错的结果。
|
