вЛжжТжЪНЫэЕРХРааЦїЩшМЦ(КЌCADСуМўЭМзАХфЭМ,CATIAШ§ЮЌЭМ)
РДдДЃК56doc.com зЪСЯБрКХЃК5D25514 зЪСЯЕШМЖЃКЁяЁяЁяЁяЁя %E8%B5%84%E6%96%99%E7%BC%96%E5%8F%B7%EF%BC%9A5D25514
зЪСЯвдЭјвГНщЩмЕФЮЊзМ,ЯТдиКѓВЛЛсгаЫЎгЁ.зЪСЯНіЙЉбЇЯАВЮПМжЎгУ. Ум БЃ Лн Аяжњ
зЪСЯНщЩм
вЛжжТжЪНЫэЕРХРааЦїЩшМЦ(КЌCADСуМўЭМзАХфЭМ,CATIAШ§ЮЌЭМ)(ШЮЮёЪщ,ПЊЬтБЈИц,ЮФЯзеЊвЊ,ТлЮФЫЕУїЪщ15000зж,CADЭМ9еХ,CATIAШ§ЮЌЭМ)
еЊвЊ
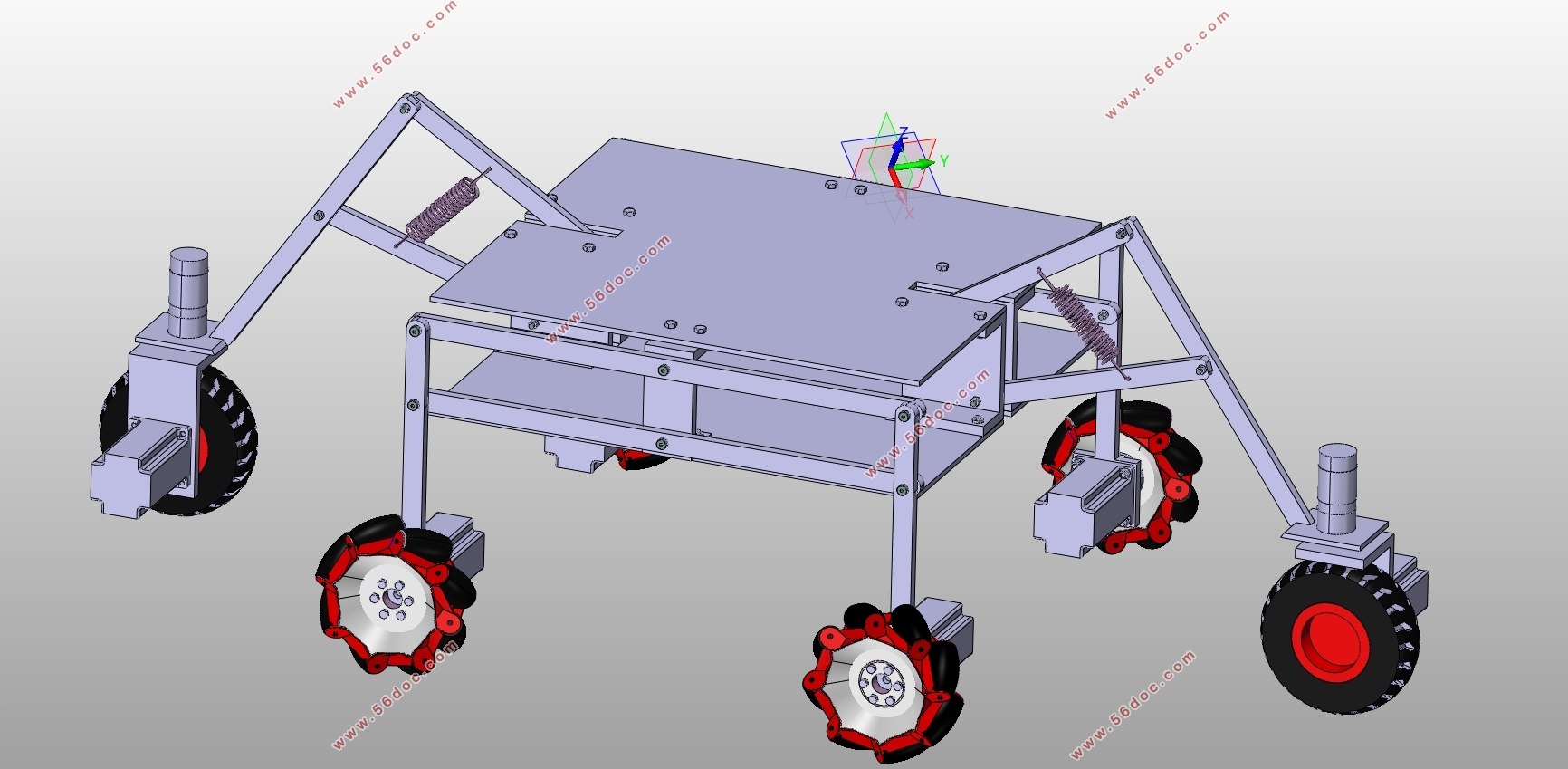
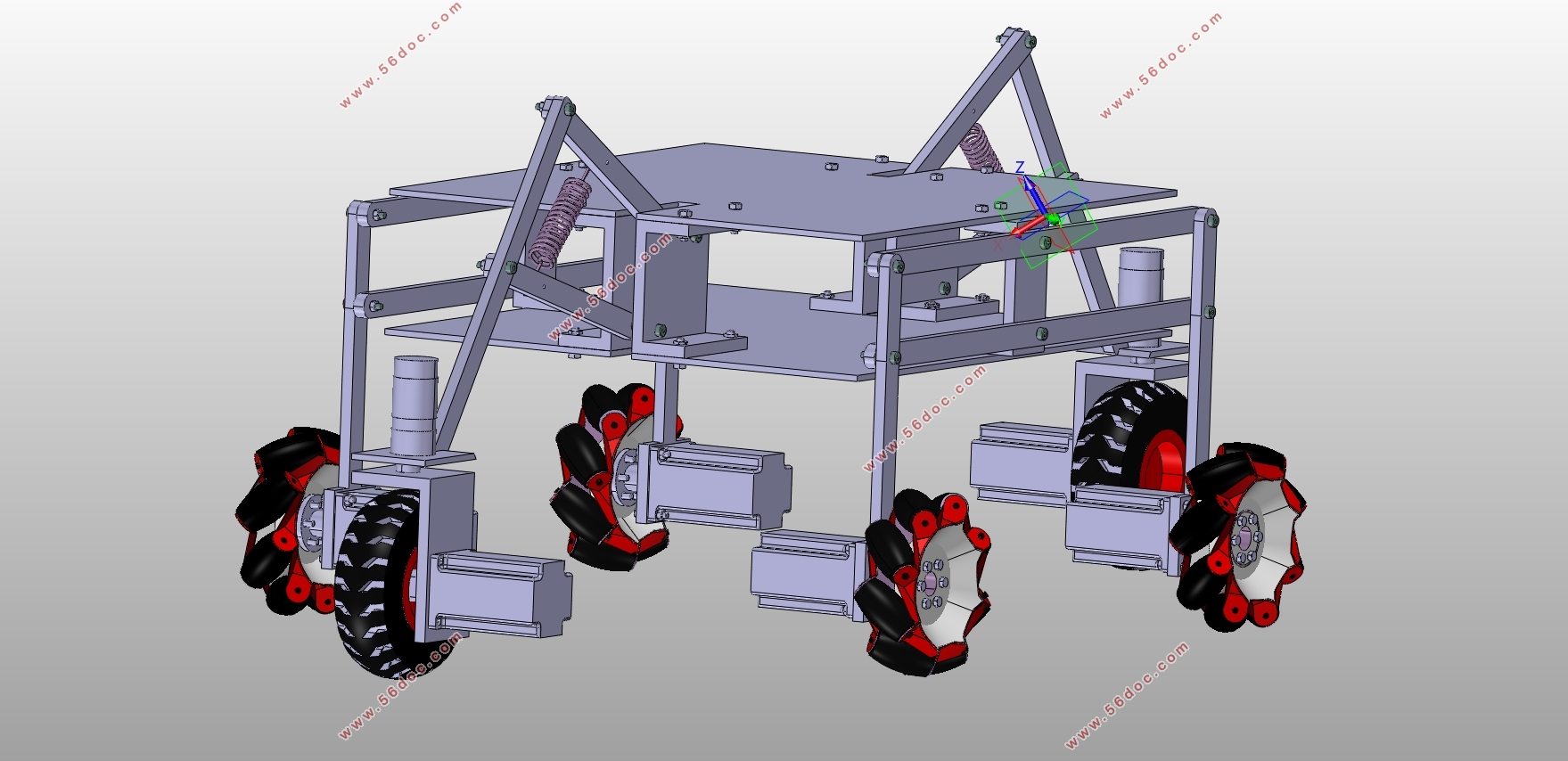
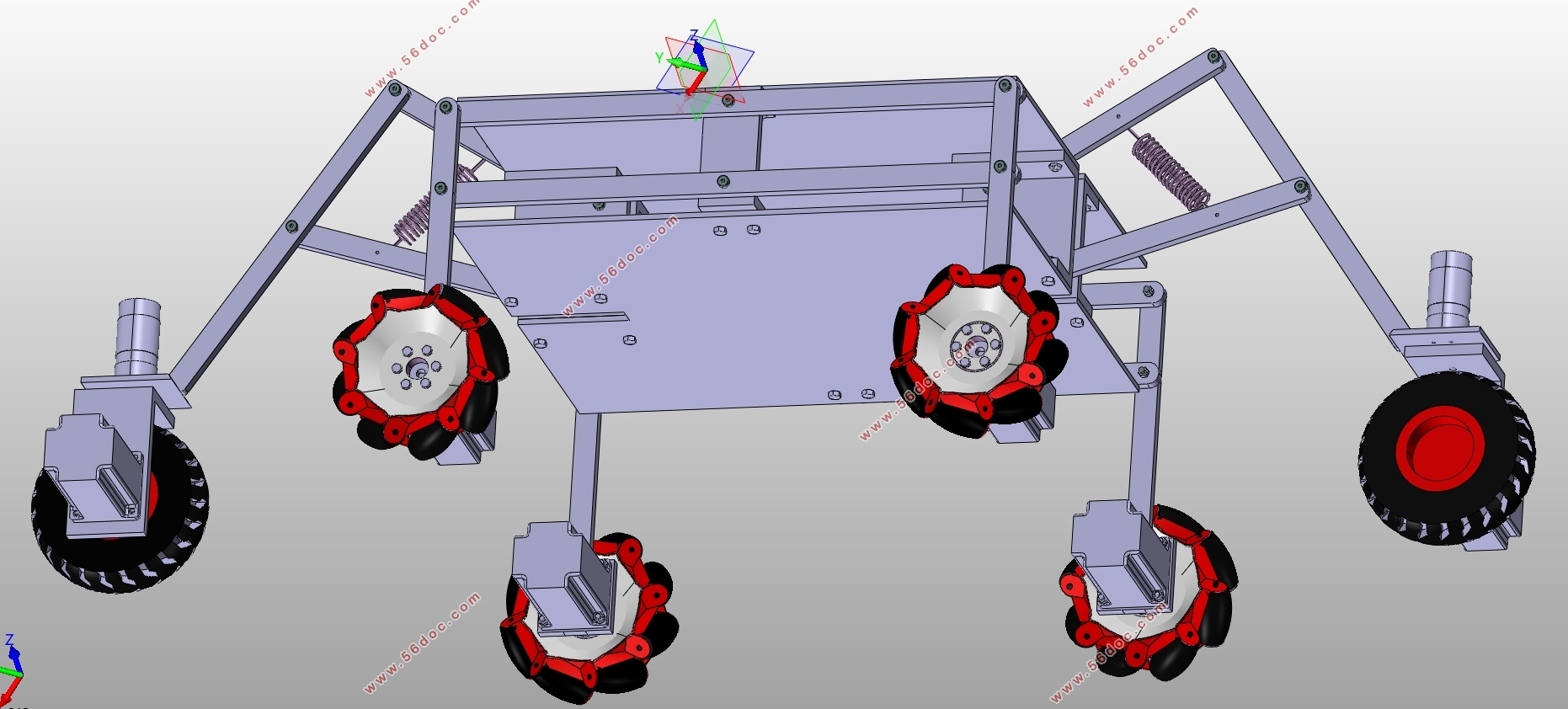
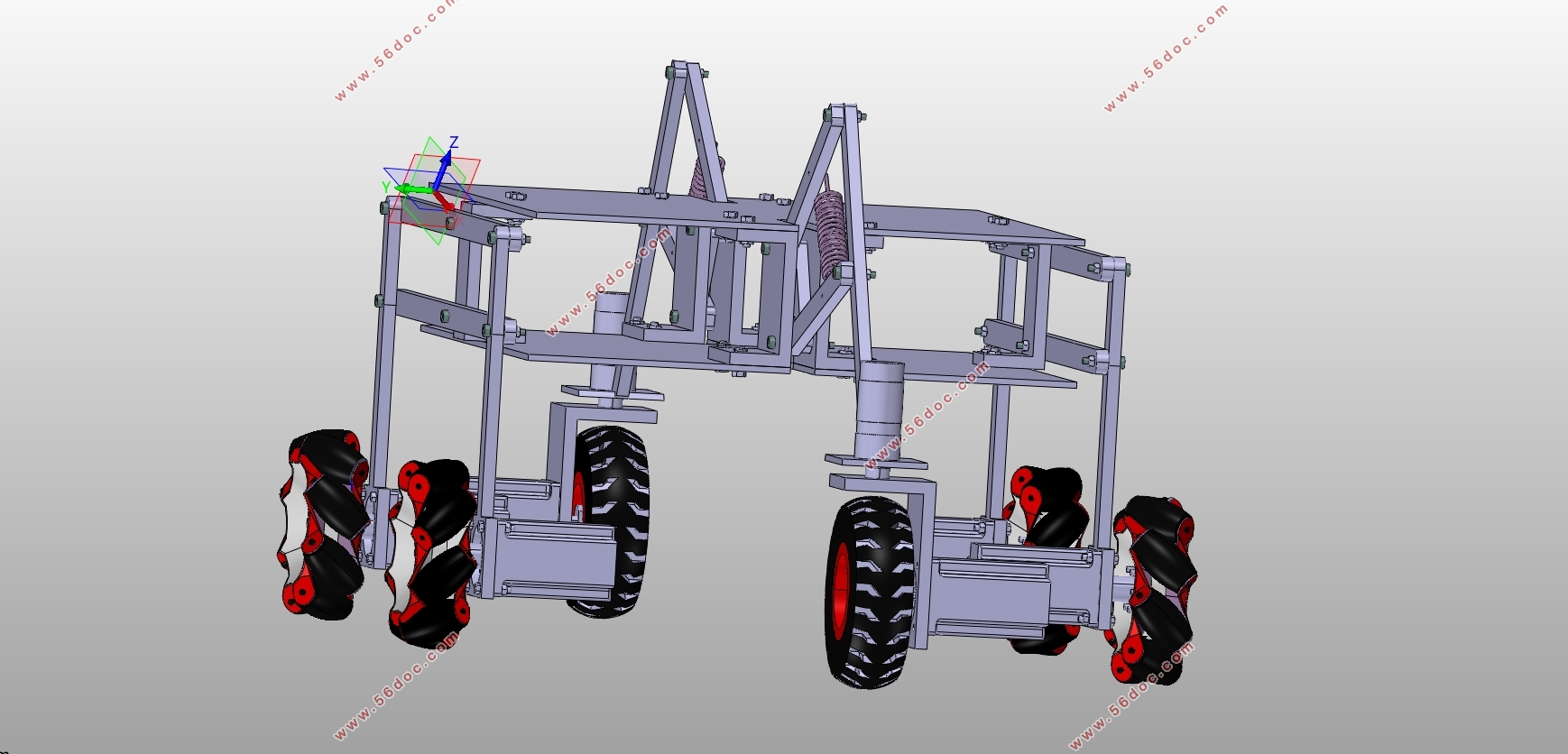
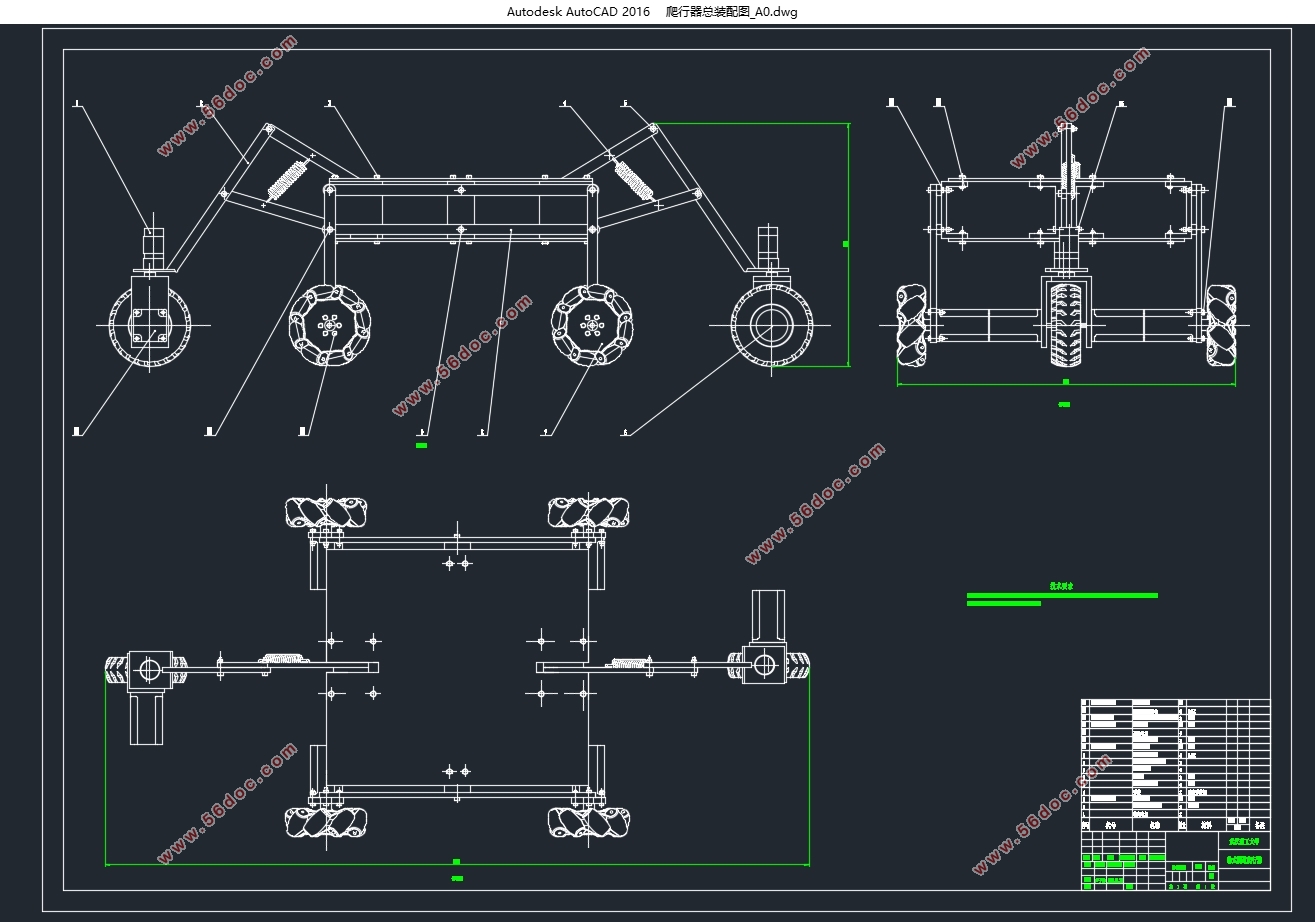
ЮЊСЫФмЙЛдкЫэЕРжаАВШЋБуНнЕиЬНВтЩјТЉЫЎЕФЮЛжУЃЌЩшМЦСЫвЛПюФмЙЛБЛЖЏдНЙ§1.5БЖГЕТжжБОЖИпЖШеЯАЧвОпгаШ§ИіздгЩЖШШЋЗНЮЛвЦЖЏЕФЛњЦїШЫЁЃИУЛњЦїШЫЙВМЦСљИіГЕТжЃЌСНВрВЩгУСНИіMecanumТжзїЮЊЧ§ЖЏТжЃЌАВзАдкЫФБпаЮдНеЯЛњЙЙЩЯЁЃЧАКѓСНЖЫВЩгУЦеЭЈЕФЯ№НКТжзїЮЊдНеЯТжЃЌАВзАдкЫЋЧњБњМгЕЏЛЩЕФдНеЯЛњЙЙЩЯЁЃБОЮФНщЩмСЫХРааЦїЕФзщГЩКЭЙЄзїдРэЃЌМЦЫуВЂЩшМЦСЫЧњБњСЌИЫЃЌЕчЛњЕШЛњЙЙЃЌЭЌЪБдЫгУCATIAШэМўМАAdamsШэМўЭъГЩСЫНјааШ§ЮЌНЈФЃЁЂащФтзАХфКЭЗТецФЃФтЕФЙЄзїЃЌЗТецНсЙћБэУїИУХРааЦїНсЙЙКЯРэЃЌПЩвдЭъГЩШ§ИіздгЩЖШЕФдЫЖЏЧвФмЙЛдНЙ§ЙцЖЈИпЖШЕФеЯАЁЃзюКѓЪЙгУArduinoАхБраДЯрЙиГЬађЃЌЭъГЩСЫХРааЦїжБааЁЂКсааЁЂдЕиа§зЊЕФЖЏзїЁЃ
ЙиМќДЪЃКЫэЕРХРааЦїЃЛMecanumТжЃЛБЛЖЏдНеЯ
Abstract
In order to detect the location of water leakage safely and conveniently in tunnels, a robot that can move across the obstacle whose the vertical height is 1.5 times wheel diameterand move with three degrees of freedom is designed. The robot has six wheels. The four wheels which are arranged on both sides are Mecanum wheels and the two wheels which are arranged on the front and back are rubber wheels. In this paper, the composition and working principle of the robot are introduced. Crank pitman mechanism, motor and other mechanism aredesigned. 3D modeling, virtual assembly and simulation areachievedbyusingCATIAandAdams. Theresultshowsthisrobotcan move with three degrees of freedom andhave the great ability to move across the obstacle. Finally, the robot is controlled by using Arduino development board downloadedthe control program.
Key WordsЃКTunnel crawlerЃЛMecanum wheelЃЛPassive obstacle surmounting
2.1ХРааЦїНщЩм
ХРааЦїЕФЩшМЦАќРЈЛњаЕНсЙЙЕФЩшМЦКЭдЫЖЏГЬађЕФБрГЬЁЃЛњаЕВПЗжжївЊгЩдНеЯНсЙЙКЭЧ§ЖЏВПЗжЙЙГЩЁЃ
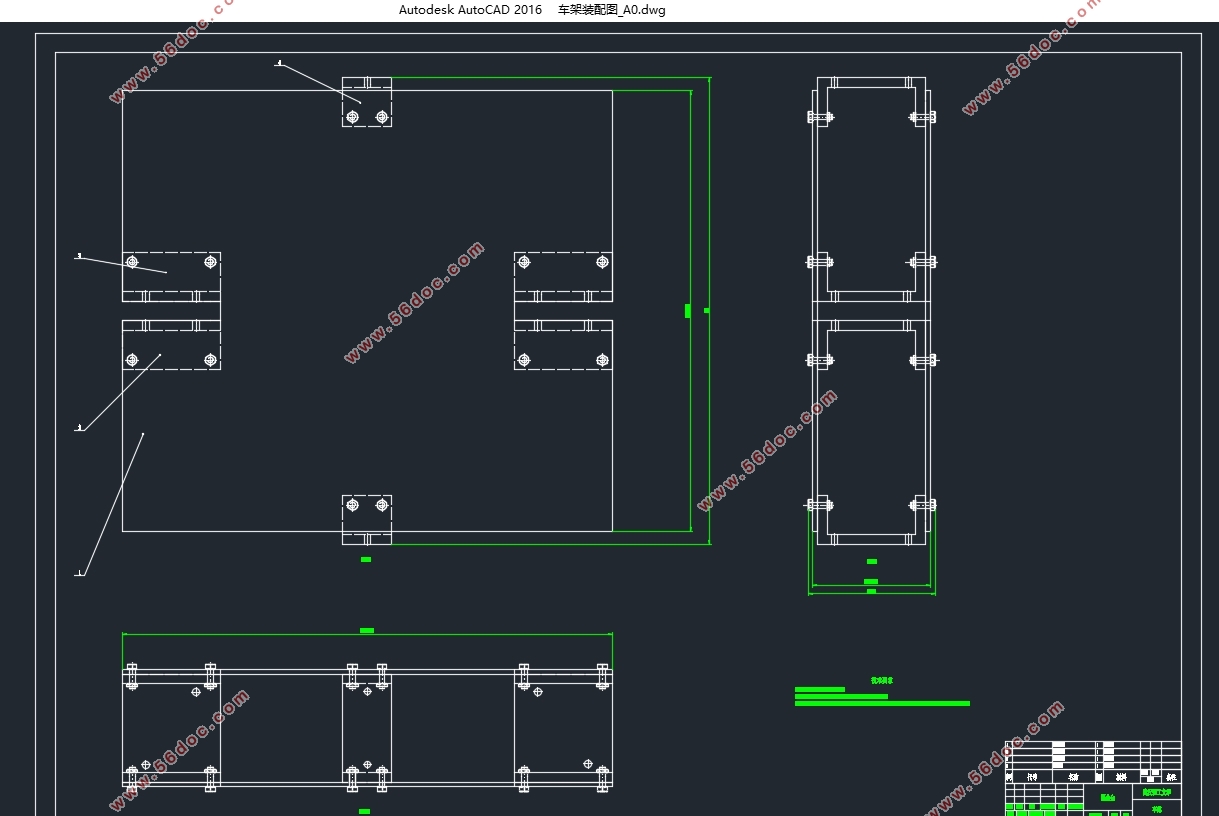
2.1.1ХРааЦїГЕМмНщЩм
ГЕМмЦ№зХГадиХРааЦїЛњЙЙКЭЯрЙиЩшБИЕФзїгУЁЃГЕМмЕФВФСЯгІОпгаЧПЖШИпЃЌжЪСПЧсЃЌвзМгЙЄЕФЬиЕуЁЃЫљвдбЁдёЪЙгУТСКЯН№зїЮЊГЕМмЕФВФСЯЁЃЩшМЦЕФаЮзДЮЊГЄЗНаЮЃЌетбљЕФЩшМЦПЩвдЪЙЕУХРааЦїИќМгПЩППЁЃ
2.1.2ХРааЦїЫЋЧњБњдНеЯЛњЙЙ
ХРааЦїЫЋЧњБњдНеЯЛњЙЙгЩЦНУцЫЋЧњБњЛњЙЙЁЂМѕе№ЕЏЛЩЁЂзЊЯђЕчЛњКЭЕМЯђЧАТжзщГЩЁЃЕБХРааЦїгіЕНеЯАЪБЃЌЕМЯђТжНгДЅЧАЗНеЯАЃЌеЯАИјгыЕМЯђТжЕФзшСІЪЙЦНУцЫЋЧњБњЛњЙЙВњЩњБЛЖЏЕФаЮБфЃЌДгЖјЪЙЕУЧњБњИЫБЛЖЏЕиЬЇЦ№ЃЌДгЖјЪЙЕУЕМЯђТжбиеЯАЕФЗНЯђЯђЩЯХРЩ§ВЂдНЙ§еЯА[17]ЁЃЧњБњжЎМфЕФЕЏЛЩдкдНеЯЕФЙ§ГЬжаЃЌЫцзХЧњБњЕФЬЇЦ№ЃЌЕЏЛЩВЛЖЯЪеЫѕЃЌЦ№зХаюФмМѕеёЕФзїгУЁЃЖјЕБХРааЦїдНеЯНсЪјЃЌЕЏЛЩдђЪЭЗХДЂДцЕФФмСПЃЌЪЙЧњБњНсЙЙЛиЕНжЎЧАЕФзДЬЌ
2.1.3ХРааЦїВрВПЦНааЫФБпаЮдНеЯЛњЙЙ
ВрВПЦНааЫФБпаЮдНеЯЛњЙЙгЩЦНааЫФБпаЮЛњЙЙКЭСНИіMecanumТжзщГЩЁЃЕБвЛБпЕФТжгыеЯАЮяНгДЅЪБЃЌгЩгкзшСІЕФзїгУЃЌЫФИЫзщГЩЕФЦНааЫФБпаЮЛњЙЙЛсВњЩњЯргІЕФаЮБфЃЌгЩгкаЮБфЕФДцдкЃЌХРааЦїдкдНеЯЪБЃЌжиаФНЕЕЭЃЌФмИќКУЕиЪЪгІВЛЭЌЕФЕиаЮ
ФПТМ
Ек1еТаїТл 1
1.1 ФПЕФМАвтвх 1
1.1.1 ТжЪНХРааЦїНщЩм 1
1.1.2 СљТжТжЪНХРааЦїЕФгХЕу 1
1.2 ЙњФкЭтбаОПЯжзД 2
1.3 баОПФкШнНщЩм 3
1.4 аЁНс 4
Ек2еТЗНАИЩшМЦ 5
2.1 ХРааЦїНщЩм 5
2.1.1 ХРааЦїГЕМмНщЩм 5
2.1.2 ХРааЦїЫЋЧњБњдНеЯЛњЙЙ 5
2.1.3 ХРааЦїВрВПЦНааЫФБпаЮдНеЯЛњЙЙ 6
2.2 ЩшМЦМАМЦЫу 6
2.2.1 ХРааЦїГЕТжЩшМЦ 6
2.2.2 ХРааЦїВрВПЦНааЫФБпаЮдНеЯЛњЙЙЩшМЦ 8
2.2.3 ХРааЦїЧњБњСЌИЫдНеЯЛњЙЙЩшМЦ 9
2.2.4 ХРааЦїГЕМмЩшМЦ 17
2.2.5 ХРааЦїЕчЛњЩшМЦгыбЁаЭ 19
2.3 аЁНс 23
Ек3еТХРааЦїдЫЖЏбЇЗжЮі 24
3.1 ХРааЦїФцдЫЖЏбЇФЃаЭНЈСЂ 24
3.2 аЁНс 26
Ек4еТХРааЦїдЫЖЏЗТец 27
4.1 ХРааЦїЕФAdamsЗТец 27
4.2 аЁНс 28
Ек5еТХРааЦїПижЦ 29
5.1 ХРааЦїПижЦЗНЪНЗжЮі 29
5.2 ХРааЦїДњТыБраД 29
Ек6еТНсТл 33
ВЮПМЮФЯз 34
ИНТМ 35
жТаЛ 43
|
