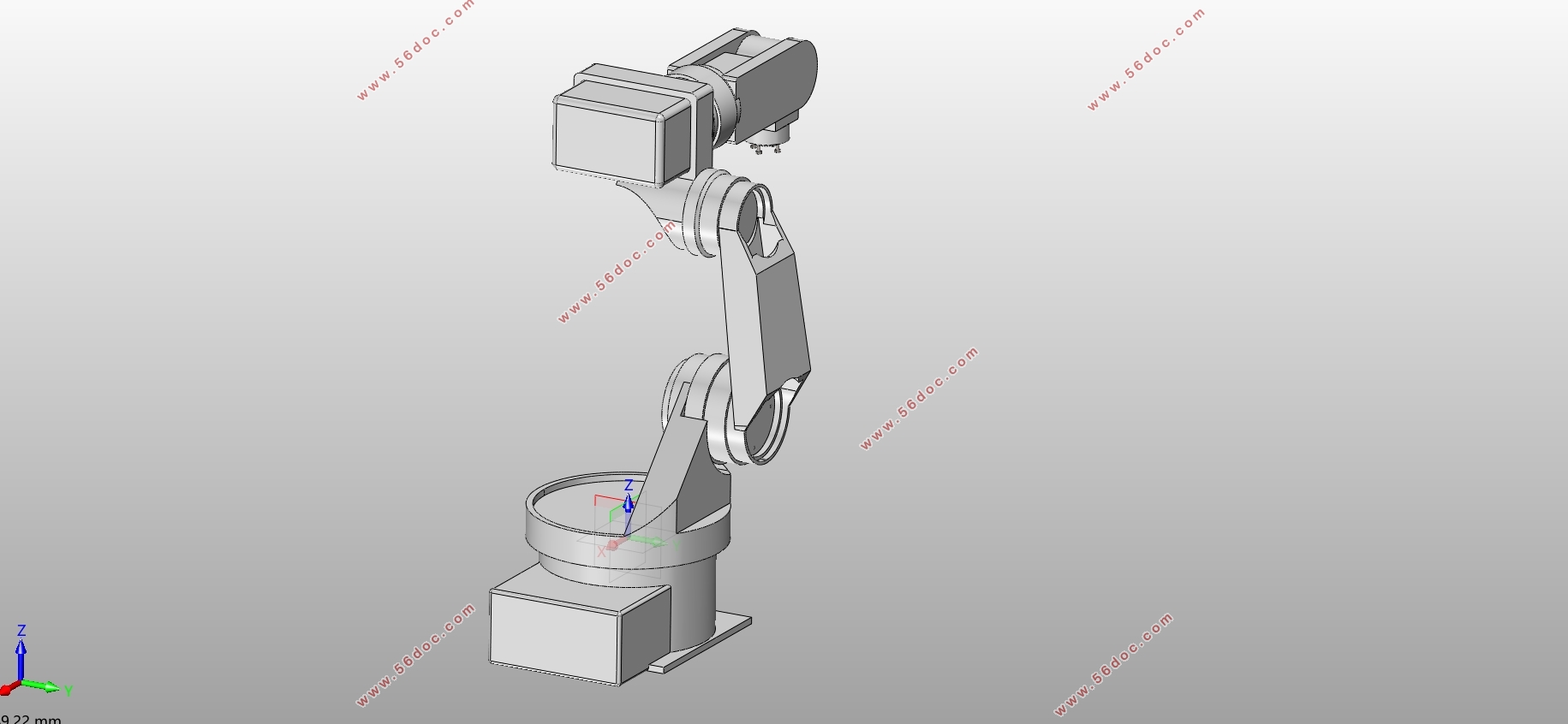
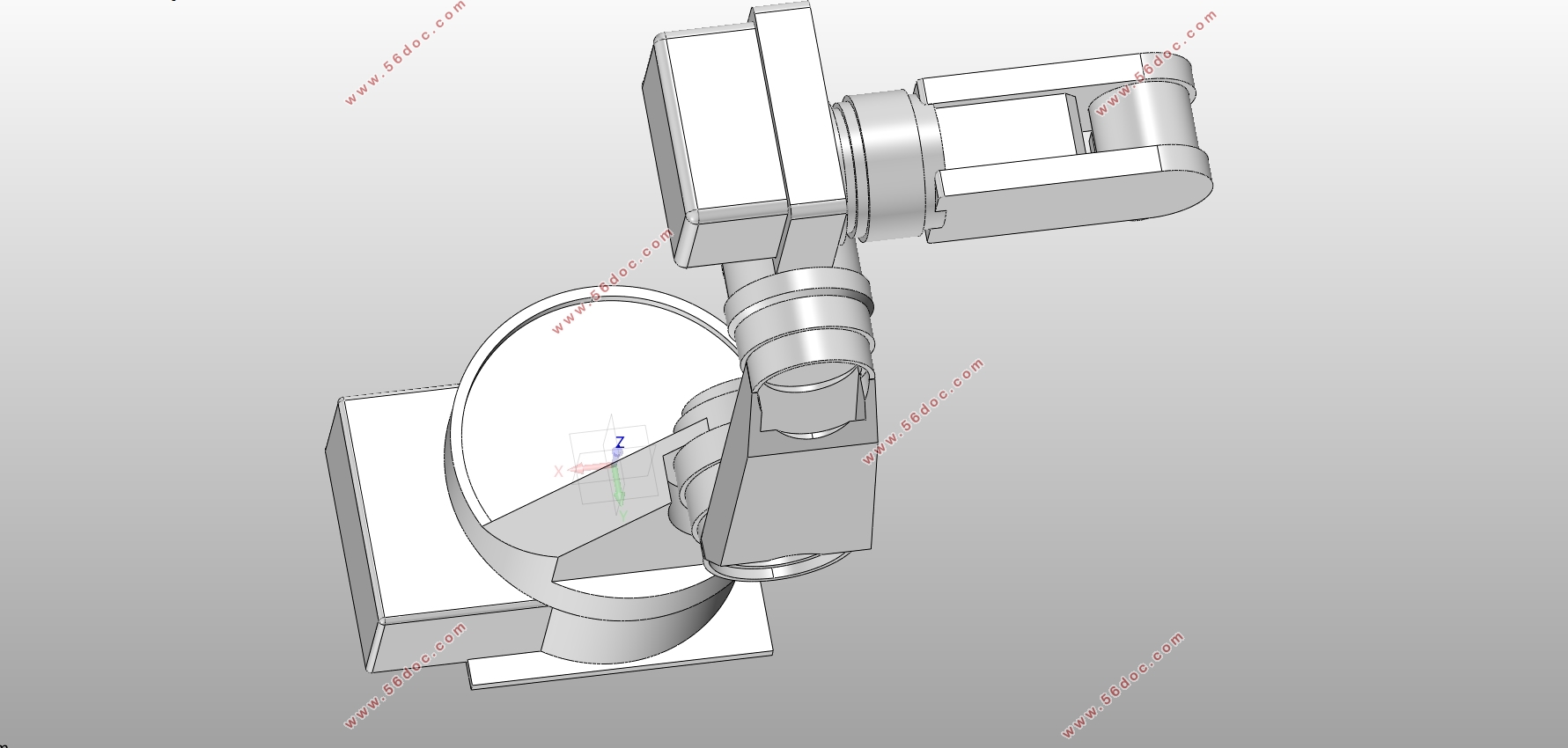
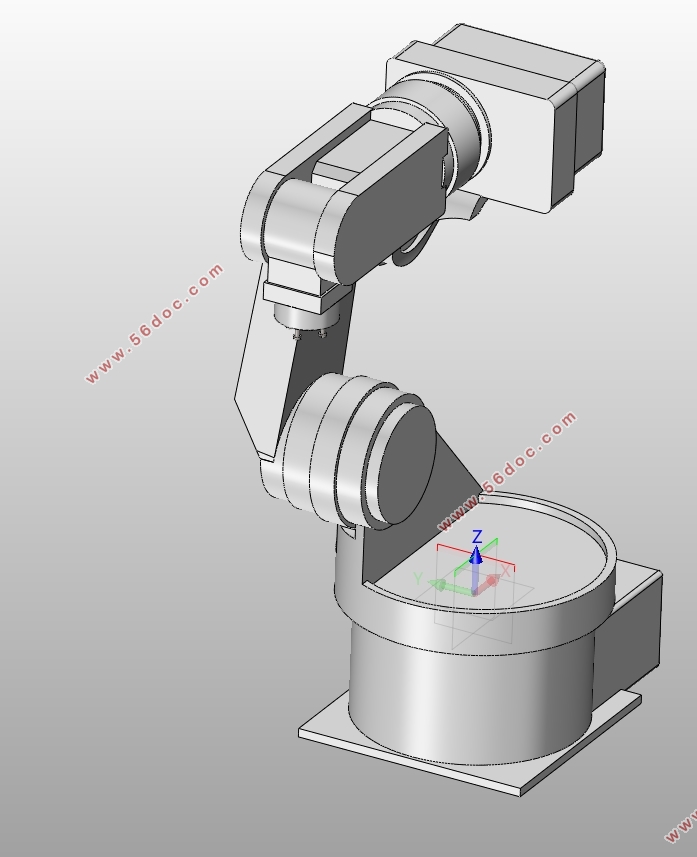
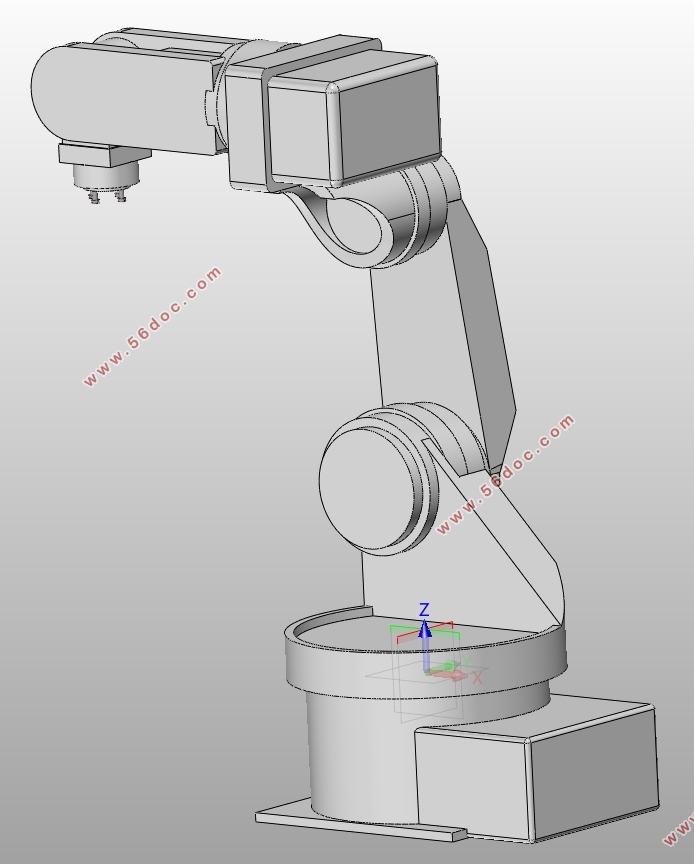
数控铣床六自由度上下料机器人设计(含CAD零件图装配图,SolidWorks三维图)
来源:56doc.com 资料编号:5D25529 资料等级:★★★★★ %E8%B5%84%E6%96%99%E7%BC%96%E5%8F%B7%EF%BC%9A5D25529
资料以网页介绍的为准,下载后不会有水印.资料仅供学习参考之用. 密 保 惠 帮助
资料介绍
数控铣床六自由度上下料机器人设计(含CAD零件图装配图,SolidWorks三维图)(任务书,开题报告,论文说明书14000字,CAD图7张,SolidWorks三维图)
摘要
本文主要研究了机器人正逆运动学及仿真,气动手爪的设计。
本文根据已知的机器人尺寸参数,按照D-H方法,建立机器人的连杆坐标系。得到坐标变换矩阵。通过几何法与欧拉角变换法计算逆运动学解,筛选最合适的解。使用MATLAB的robotics toolbox计算运动学逆解验证的同时计算仿真点连杆夹角。设计机器人前端气动手爪及气动控制方案。使用SolidWorks建立机器人和气爪的模型,进行动画仿真。
关键词:六自由度机器人;运动学分析;气动手爪
Abstract
This paper mainly studies the inverse kinematics and simulation of the robot, the design of pneumatic gripper.
In this paper, according to the known robot size parameters, according to the D-H method, the establishment of the robot linkage coordinate system. Get the coordinate transformation matrix. The inverse kinematics solution is calculated by the geometric method and the Euler angle transformation method, and the most suitable solution is selected. Using MATLAB's robotics toolbox to calculate the kinematic inverse solution to verify the angle of the simulation point. Design of Robot Front Pneumatic Hands and Pneumatic Control. Use SolidWorks to build robots and gripper models for animated simulation.
Key words: six-degree-of-freedom robot; kinematics analysis; pneumatic gripper
设计要求
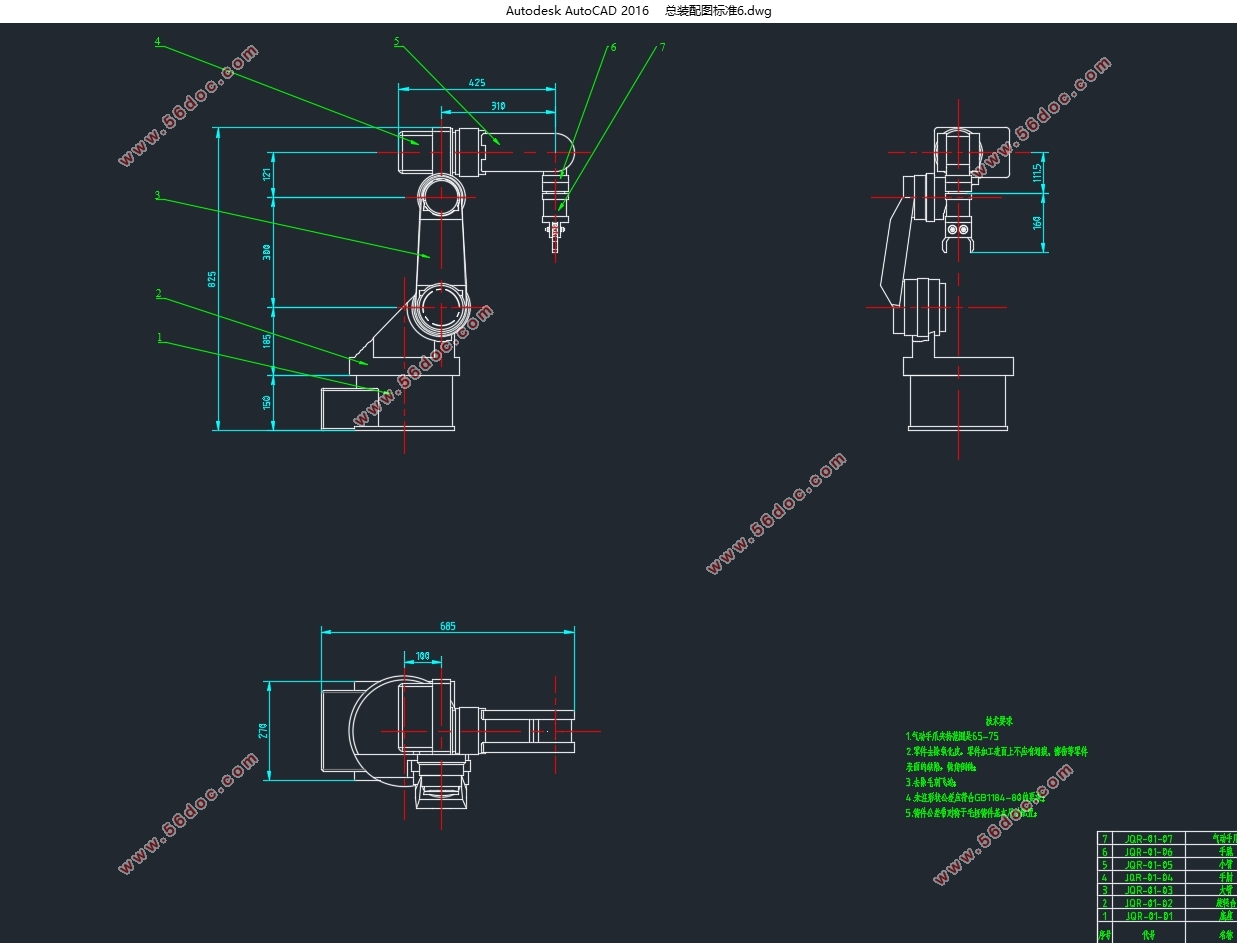
为经济数控铣床设计一个六自由度机器人,实现上下料。技术参数为:1.夹持器承载能力:2kg;2.X或Z最大线位移: 150mm;3.最大角位移:A=90°,B=120°,C=180°;4.手臂最大伸程:650mm;5.夹持力:300-500N。
对机器人的机械结构和功能进行分析,设计机器人结构及前端抓手,并设计抓手的气动控制方案,对设计的机器人进行运动过程仿真。
总体设计方案
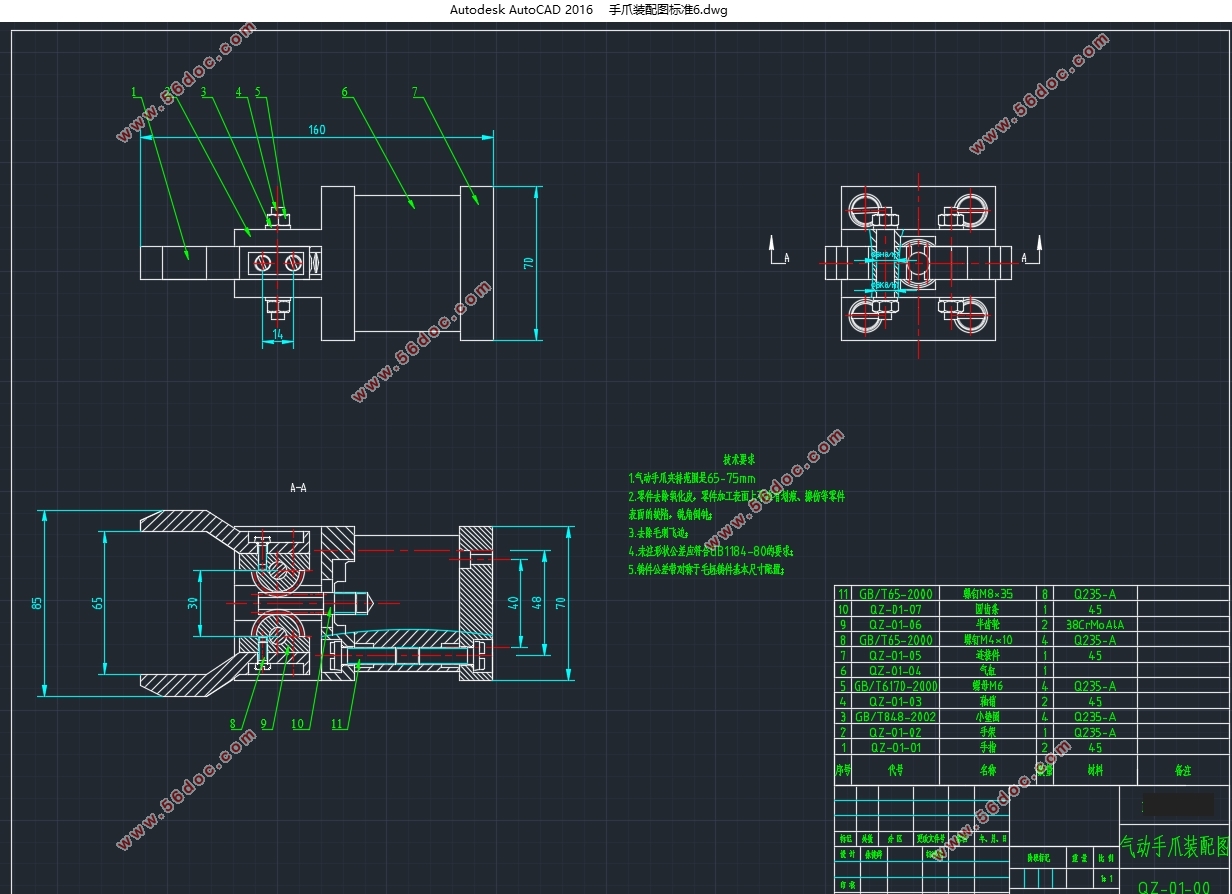
基于元创兴机器人的本体结构,设计一个可以为数控铣床上下料的六自由度机器人。用SolidWorks建立三维模型。采用标准的 D-H建模方法,建立机器人数学模型。利用数学推导,建立方程并求解。利用MATLAB下的Robotics工具箱进行验证与仿真。再借用MATLAB计算结果制作SolidWorks运动仿真动画。气动手爪设计选择SDA50-10复动型薄壁气缸,通过气缸中的压缩气体推动活塞使连杆齿条做往复运动,经过扇形齿轮带动手爪开合与夹紧。

目录
摘要 3
第一章绪论 1
1.1 研究背景和意义 1
1.2 国内外机械臂研究现状 2
1.3 本文主要研究内容 3
第二章数控铣床上下料六自由度机器人需求分析 4
2.1 设计要求 4
2.2 总体设计方案 4
第三章数控铣床上下料六自由度机器人运动学分析 5
3.1 六自由度机器人结构设计 5
3.2 机器人运动学模型的建立 8
3.2.1 坐标变换数学基础 8
3.2.2 D-H坐标系原则 9
3.3.3 六自由度机器人D-H坐标系 10
3.3 机器人正运动学分析 12
3.4 机器人逆运动学分析 13
3.4.1 前三个关节角 14
3.4.2 后三个关节角 16
3.5 机器人运动学仿真 18
第四章数控铣床上下料六自由度机器人前端装置设计 22
4.1 气动抓手设计要求 22
4.2 气动抓手结构设计 22
4.3 气动抓手气缸选型与计算 23
4.4 气爪与机器人连接方案设计 25
4.5 气动控制方案设计 25
4.6 法兰盘有限元分析 27
4.7 数控铣床上下料六自由度机器人运动过程仿真 29
第五章总结与展望 33
5.1 总结 33
5.2 展望 33
参考文献 34
致谢 36
|
