基于前馈神经网络的自适应PID控制器仿真研究(MATLAB仿真程序)
来源:56doc.com 资料编号:5D16222 资料等级:★★★★★ %E8%B5%84%E6%96%99%E7%BC%96%E5%8F%B7%EF%BC%9A5D16222
资料以网页介绍的为准,下载后不会有水印.资料仅供学习参考之用. 密 保 惠 帮助
资料介绍
基于前馈神经网络的自适应PID控制器仿真研究(MATLAB仿真程序)(课题申报表,任务书,开题报告,中期检查表,外文翻译,论文17000字,程序,答辩PPT)
摘 要
由于神经网络能够实现任意非线性映射,并具有极强的自适应、自学习、自组织能力,能实现对PID控制器参数的在线自适应整定。
本文在传统PID控制的基础上,通过对自适应PID控制和BP神经网络的研究,引用基于前馈神经网络的自适应PID控制器。该控制器由两部分组成:首先是经典的PID控制器:它直接与被控对象形成闭环系统;其次是神经网络:根据控制系统的调节偏差,调节PID控制器的参数。BP神经网络的权值训练采用误差反向传播学习算法,即BP算法。利用神经网络通过对系统性能的学习,实现具有最佳组合的PID控制。本文通过两个具体的非线性系统实例,以MATLAB作为仿真工具,应用上述控制方法进行在线控制仿真实验。仿真结果表明,基于BP神经网络的自适应PID控制器具有良好的控制品质。
关键词:BP神经网络;PID控制器;自适应控制
Abstract
The neural network could do some adaptively online tuning with the parameters of the PID controller, for which it is able to achieve arbitrary nonlinear mappings effectively, meanwhile the ability of adaptation,
On the base of the traditional PID controller, as well as the adaptive PID controller and BP neural network, the adaptive PID controller based on the feed-forward neural network is put forward in the paper. The controller consists of two parts. One is PID controller, the other is neural network. The former constructs the close loop together with the object; the latter is aimed at adjusting the parameters according to the adjustment errors of the systems. self-learning and self-organization. The weight training is done by BP learning algorithm. In use of neural network, the best combination of the PID controller has been carried out by the learning for the system performance. The above control method has been used to do some simulated experiments in two examples of the paper, the experiments which are made by using MATLAB. The results of the simulation show that the adaptive PID controller based on BP neural network has the better control quality.
Key word: BP neural network; PID controller; adaptive control
目 录
第1章 概 述 1
1.1 神经网络的发展和应用 1
1.2 神经网络PID控制 3
1.3 本章小结 4
第2章 BP神经网络 5
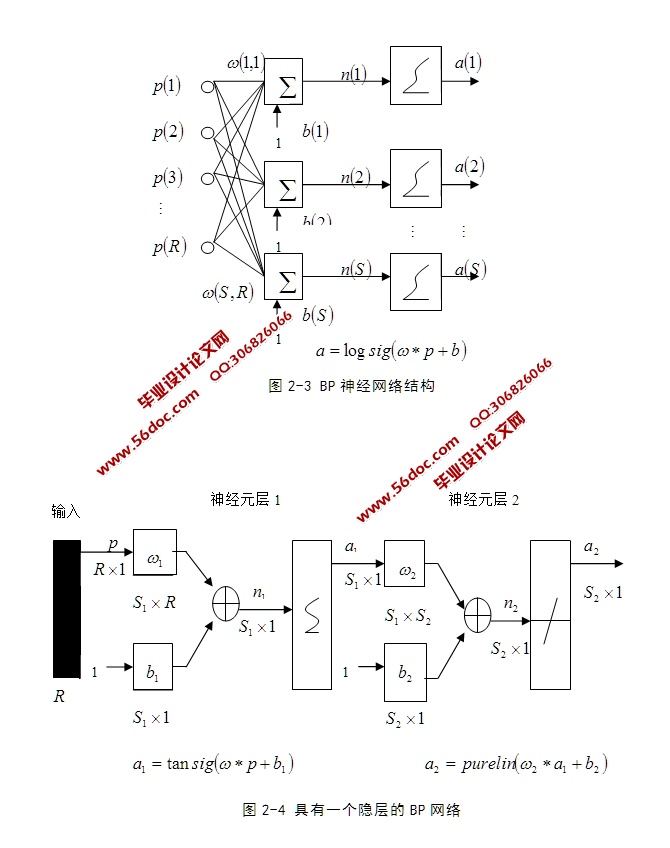
2.1 BP网络函数及BP神经元模型 5
2.2 BP网络的网络结构 6
2.3 BP神经网络的初始化 8
2.4 BP神经网络的学习规则 8
2.5 BP神经网络的训练 9
2.6 BP算法的改进 10
2.7 本章小结 11
第3章 自适应PID控制 12
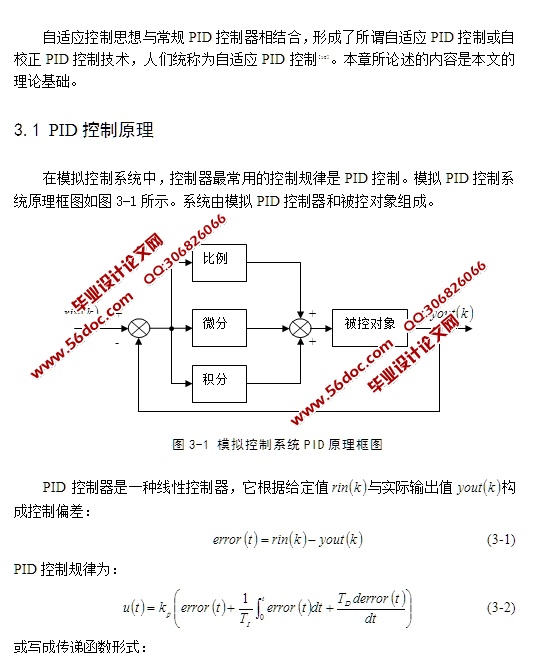
3.1 PID控制原理 12
3.2 自适应控制 13
3.3 几种自适应PID控制 17
3.4 本章小结 20
第4章 基于前馈神经网络自适应PID控制方案 21
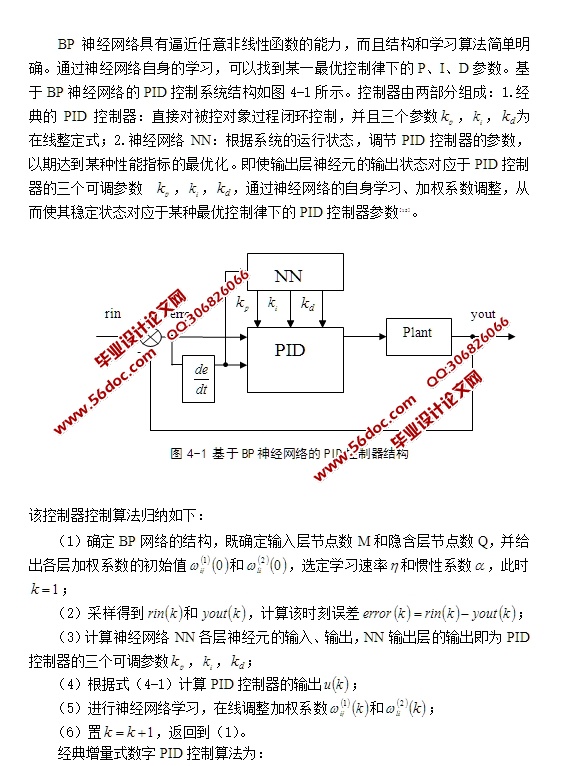
4.1 基于前馈神经网络参数自学习的PID控制器 21
4.2 改进型前馈神经网络参数自学习PID控制器 25
4.3 本章小结 27
第5章 基于前馈神经网络自适应PID控制器仿真实验 28
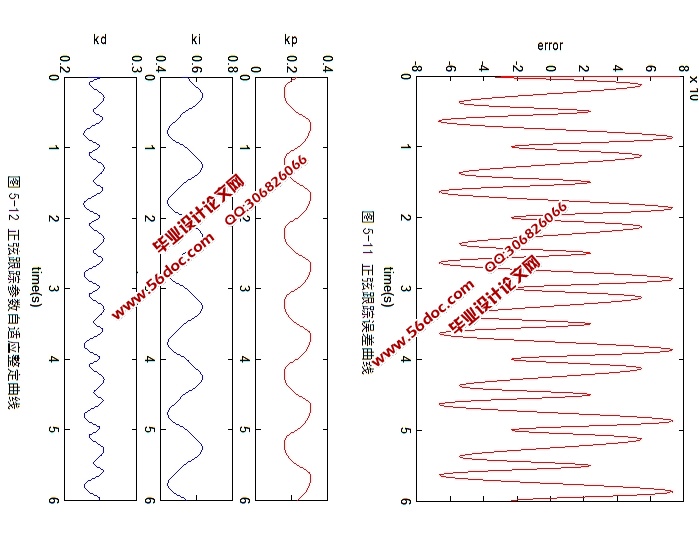
5.1 仿真对象及实验说明 28
5.2 仿真结果及分析 29
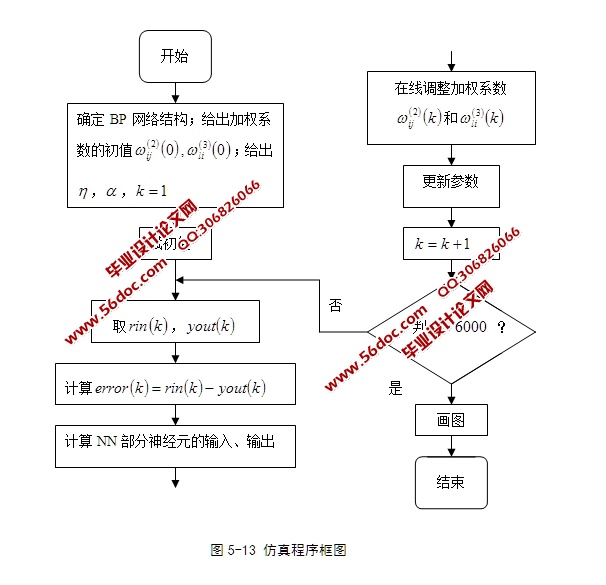
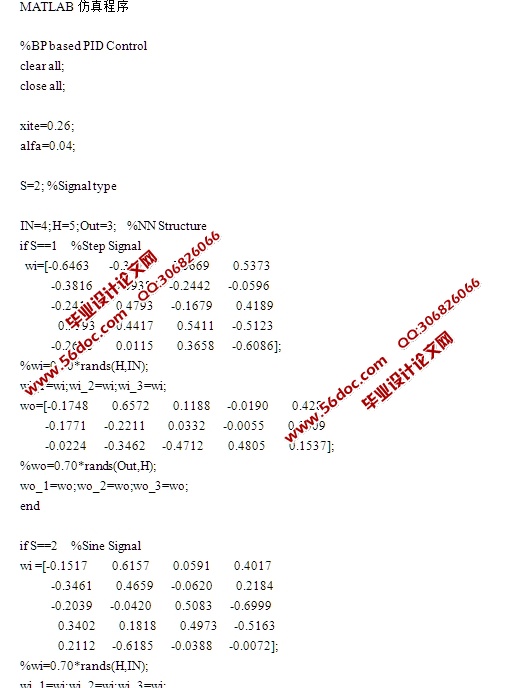
5.3 MATLAB仿真程序的结构框图 35
5.4 本章小结 36
结 论 37
参考文献 38
致 谢 39
附 录 40
|