太阳能自动跟踪系统设计(含CAD零件图装配图)
来源:56doc.com 资料编号:5D25769 资料等级:★★★★★ %E8%B5%84%E6%96%99%E7%BC%96%E5%8F%B7%EF%BC%9A5D25769
资料以网页介绍的为准,下载后不会有水印.资料仅供学习参考之用. 密 保 惠 帮助
资料介绍
太阳能自动跟踪系统设计(含CAD零件图装配图)(任务书,开题报告,周进展表,论文说明书10000字,CAD图14张,答辩PPT)
摘要
能源危机已经成为当今世界的重要问题之一。太阳能作为一种洁净能源,具有很多优越性,但太阳能利用效率的普遍偏低却限制了其发展。本课题设计了一种太阳自动追踪系统,这个系统以控制器为核心,通过光电追踪的方式来实现对太阳的定位与追踪,从而提高太阳能装置的能量转换效率,具有研究和应用的价值。
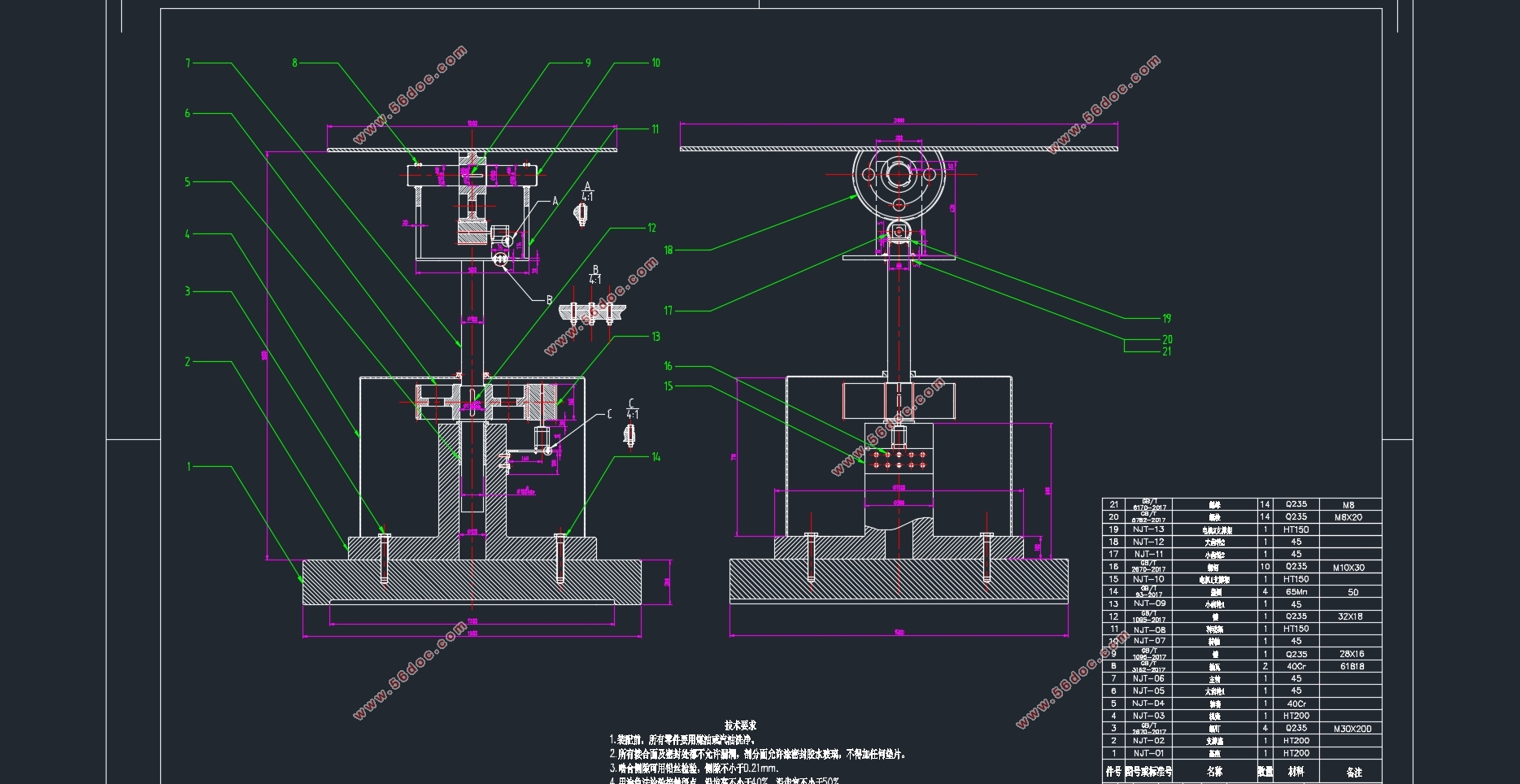
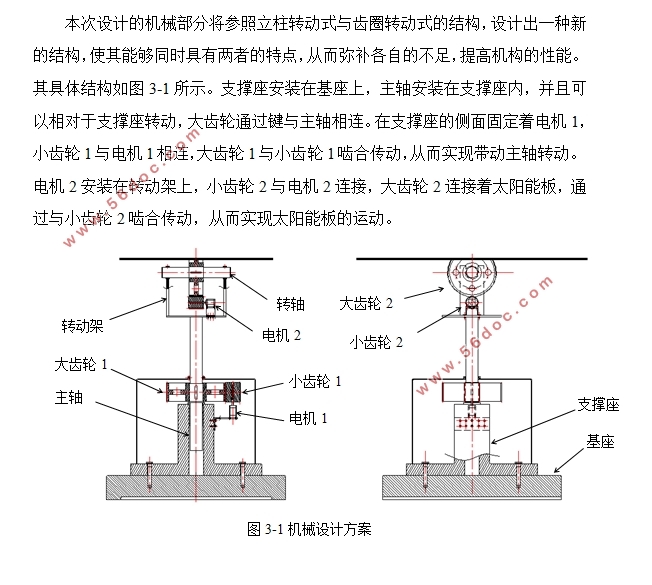
本次设计的太阳自动追踪系统由机械与控制两部分组成。机械部分可以分为基座、支撑座、转动架、齿轮组等零件,具有结构简单,传动比大,刚度较高等优点。控制部分由光敏传感器模块,单片机模块及步进电机模块组成。光敏传感器模块的作用是检测太阳的实时位置;单片机模块负责处理传感器的信息并控制步进电机的工作状态;步进电机模块是用来驱动执行机构,从而完成太阳跟踪的任务。
关键词:光电跟踪 光敏传感器 单片机 步进电机
Design of Solar Tracking System
Abstract
Theenergy crisis isone of the eventful issuesin today's world. As a clean energy source, solar energy has manyascendancyamong all renewable energy sources, but the low efficiency of solar energy utilization limits its evolvement.A solar automatic tracking system is designed in this thesis. The single-chip microcomputer is used as the core and the positioning and tracking of the sun is determined throughphotoelectric tracking, thus the energy conversion efficiency of solar devices is improved. It playsgreatsignificancein researching and application.
The automatic solar tracking system consists of mechanical and control components. The mechanical part is composed of the base, the main shaft, the gear set and the turret. It has the propertyof large transmission ratio and high rigidity. A photosensitive sensor module, a single chip module and a stepping motor module constitute the control part. The photosensitive sensormodule is used to detect the real-time position of the sun; the MCU module is responsible for processing the sensor information and controlling the working state of the stepper motor; the stepper motor module is used to drive the actuator to complete the task of sun tracking.
Key Words: Photoelectrictracking;Photosensitivesensor;Microcontroller;Steppingmotor
课题设计内容
本次设计的是一种太阳能自动跟踪系统,要求设计出能够寻找太阳位置的方案,并设计一套变位装置使之能够随着太阳位置的变化而做出相应的调整。其中,对太阳位置的准确定位是本次设计的主要难点,也是最终设计能否成功的关键一环。因此,对于跟踪方案的选用以及执行机构的设计,将会影响整个跟踪系统对于太阳位置的定位能力以及跟踪能力。
本次设计将从跟踪方案与执行机构两部分着手,跟踪方案选用光电跟踪法中的光敏电阻比较法,执行机构则选用双轴跟踪,通过机械与电控部分的结合,从而实现对太阳的跟踪。该系统具有较高的跟踪精度,同时也有较快的跟踪速度,因此具有重要的实践意义和研究价值。本次设计的主要内容如下:
(1)分析比较目前主流的几种机械结构与跟踪方案,根据本次设计的要求,设计出合理的机械结构与跟踪方案。
(2)太阳跟踪系统的机械部分设计,包括齿轮组的计算、校核,轴与轴承的计算、校核以及螺纹连接的校核。
(3)控制系统的硬件设计,包括光敏电阻、步进电机、单片机的选型,以及相应电路的设计。
(4)控制系统的软件设计,包括光电检测模块、步进电机模块的流程图及程序设计。
目录
摘要 I
Abstract II
第一章绪论 1
1.1课题背景意义 1
1.2课题设计内容 1
第二章太阳跟踪系统的总体方案 3
2.1机械部分的方案分析 3
2.1.1机械部分的方案比较 3
2.1.2机械部分的设计方案 5
2.2控制部分的方案分析 6
2.2.1控制部分的方案比较 6
2.2.2控制部分的设计方案 7
第三章机械结构设计 9
3.1第一组齿轮计算 10
3.2第二组齿轮计算 13
3.3轴瓦校核计算 16
3.4抗风性分析 19
第四章控制系统的硬件设计 21
4.1光电检测模块设计 21
4.1.1光敏传感器的选型 21
4.1.2光敏传感器的安装 21
4.1.3光电转换电路 22
4.2步进电机模块设计 23
4.2.1步进电机的选择 23
4.2.4驱动模块的选择 23
4.3单片机模块设计 24
4.3.1单片机的选择 24
4.3.2单片机的I/O分配 24
4.3.3单片机的电路设计 25
第五章控制系统的软件设计 26
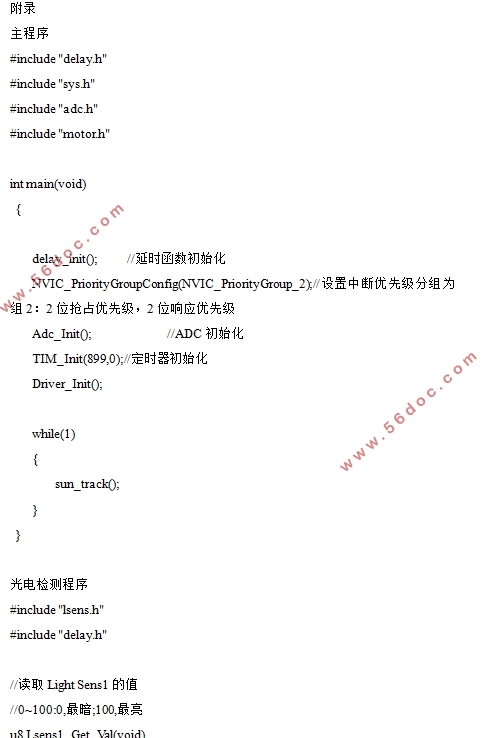
5.1主程序设计 26
5.2光电检测程序设计 27
5.2.1光电检测的流程图 27
5.2.2光电检测的部分程序 27
5.3电机驱动程序设计 28
5.3.1电机驱动的流程图 28
5.3.2电机驱动的部分程序 29
第六章经济性分析 30
第七章总结与展望 31
7.1全文总结 31
7.2展望 31
参考文献 32
致谢 33
附录 34
|
