жЧФмАсдЫЛњЦїШЫ
РДдДЃК56doc.com зЪСЯБрКХЃК5D26635 зЪСЯЕШМЖЃКЁяЁяЁяЁяЁя %E8%B5%84%E6%96%99%E7%BC%96%E5%8F%B7%EF%BC%9A5D26635
зЪСЯвдЭјвГНщЩмЕФЮЊзМ,ЯТдиКѓВЛЛсгаЫЎгЁ.зЪСЯНіЙЉбЇЯАВЮПМжЎгУ. Ум БЃ Лн Аяжњ
зЪСЯНщЩм
жЧФмАсдЫЛњЦїШЫ(ТлЮФ16000зж)
еЊвЊЃКБОЮФЭЈЙ§баОПжЧФмАсдЫЛњЦїШЫЯжзДЩшМЦГівЛжжЛљгкЕЅФПЩуЯёЭЗЪЖБ№ЮяМўВЂДјгаЖрздгЩЖШЛњаЕБлЕФжЧФмАсдЫЛњЦїШЫЁЃжївЊбаОПФкШнШчЯТЃКЪзЯШЩЯЮЛЛњЖЫМђЛЏСЫЮяМўзјБъЕФЖЈЮЛЃЌВЩгУЖўЮЌЦНУцзјБъЖЈЮЛЗНЪНЁЃВЂЖдЖўЮЌТыЪЖБ№ЕФZbarЫуЗЈНјаагХЛЏЃЌМгПьСЫЖўЮЌТыЪЖБ№ЕФЫйЖШЁЃНсКЯOpenCVЫуЗЈПтдкVisual StudioБрГЬШэМўжаБраДЭМЯёДІРэЫуЗЈКЭЛњЦїШЫЭЈаХЩЯЮЛЛњНчУцЁЃЦфДЮбЁШЁArdunioПижЦЦїзїЮЊЛњЦїШЫЕФПижЦКЫаФЁЃDCжБСїМѕЫйЕчЛњКЭL298NаЭжБСїЕчЛњЧ§ЖЏЦївдМАTCRT5000КьЭтбМЃФЃПщЃЌдкПижЦГЬађзїгУЯТЃЌЪЕЯжаазпзЊЯђЁЃЭЈаХЗНУцдђВЩгУESP8266зїЮЊКЭЩЯЮЛЛњЕФЭЈаХЙЄОпЁЃзЅШЁдђВЩгУЫФИіSG90ЖцЛњЙЙГЩЫФздгЩЖШЕФЛњаЕБлЪЕЯжЖдЮяЬхЕФзЅШЁЃЌВЂЖдЛњаЕБлЕФдЫЖЏбЇНјааЗжЮіЃЌвдБуЪЕЯжГЬађЩЯЖдЛњаЕБлЕФзМШЗПижЦЁЃзюКѓЖдећИіЯЕЭГНјааДюНЈВЂЖдЪЕЮяНјааСЌНгЃЌОВтЪдИУжЧФмАсдЫЛњЦїШЫЯЕЭГЪЕЯжСЫЕЅФПЖдЮяМўЕФзЅШЁгыЪЖБ№ЃЌМђЛЏСЫЮяМўЖЈЮЛЕФМЦЫуЃЌЮЊЕЅФПЛњЦїШЫЕФзЅШЁЬсЙЉСЫаТЕФЫМТЗЁЃ
ЙиМќДЪЃКЭМЯёДІРэЃЛOpenCVЃЛАсдЫЛњЦїШЫЃЛArdunioЃЛЛњаЕБл
Intelligent Handling Robot
AbstractЃКIn this paper, an intelligent handling robot with multi-degree-of-freedom manipulator based on monocular camera is designed by studying the status quo of intelligent handling robot. The main research contents are as follows: Firstly, the upper computer simplifies the object coordinate positioning, and adopts the two-dimensional plane coordinate positioning method. The Zbar algorithm of two-dimensional code recognition is optimized to accelerate the speed of two-dimensional code recognition. Combining OpenCV algorithm library and Visual Studio programming software, image processing algorithm and upper computer interface of robot communication are compiled. Secondly, the Ardunio controller is selected as the control core of the robot. DC DC deceleration motor, L298N DC motor driver and TCRT5000 infrared tracking module can realize walking and steering under the control program. In the aspect of communication, ESP8266 is used as the communication tool with the host computer. Four SG90 rudder mechanisms are used to form a Four-Degree-of-Freedom manipulator to grasp the object, and the kinematics of the manipulator is analyzed in order to realize the accurate control of the manipulator in the program. Finally, the whole system is built and connected with the object. After testing, the intelligent handling robot system achieves monocular object capture and recognition, simplifies the calculation of object location, and provides a new idea for the capture of monocular robot.
Key wordsЃКimage processing; OpenCV;handling robot; Ardunio; manipulator
ФПТМ
1аїТл 1
1.1баОПБГОА 1
1.2ЙњФкЭтбаОПгІгУЯжзДМАЗЂеЙЧїЪЦ 2
1.3БОТлЮФЕФжївЊЙЄзїМАеТНкАВХХ 3
1.3.1жївЊЙЄзї 3
1.3.2ТлЮФНсЙЙ 3
2ЯЕЭГЩшМЦгыЗНАИТлжЄ 5
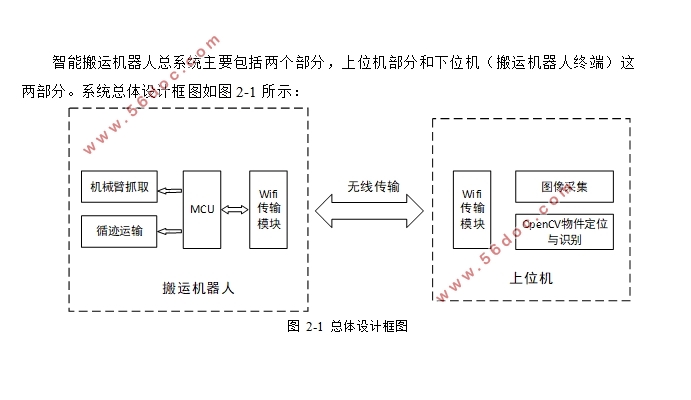
2.1ЯЕЭГзмЗНАИЩшМЦ 5
2.2ЩЯЮЛЛњШэМўЙІФмНсЙЙ 5
2.3гВМўЩшМЦЗНАИ 6
2.2.1ЕЅЦЌЛњжїПиаОЦЌЕФбЁдё 6
2.2.2 WIFIФЃПщЕФЩшМЦ 7
2.2.3бМЃФЃПщЕФЩшМЦ 7
2.2.4ЛњаЕБлФЃПщЕФЩшМЦ 7
2.2.6ЕчдДФЃПщЕФЩшМЦ 7
2.3БОеТаЁНс 8
3ЯЕЭГгВМўЩшМЦгыЪЕЯж 9
3.1жЧФмАсдЫЛњЦїШЫгВМўЩшМЦдРэ 9
3.2жївЊЕЅдЊЕчТЗЩшМЦ 10
3.2.1ЕЅЦЌЛњжїПиЕчТЗ 10
3.2.2ЮШбЙЕчТЗЩшМЦ 10
3.2.3бМЃФЃПщЕчТЗ 11
3.2.4 L298NЧ§ЖЏЕчТЗ 11
3.2.5 WIFIФЃПщЕчТЗ 12
3.2.6ЖцЛњФЃПщЕчТЗ 12
3.3БОеТаЁНс 13
4ЛњаЕБлЕФдЫЖЏбЇЗжЮі 14
4.1ЛњаЕБлНсЙЙЗжЮі 14
4.2ЛњаЕБле§дЫЖЏбЇЗжЮі 14
4.2ЛњаЕБле§дЫЖЏбЇMatlabЗТец 16
4.3БОеТаЁНк 18
5ГЬађЩшМЦ 19
5.1ЩЯЮЛЛњжїГЬађЩшМЦ 19
5.1.1ЖўЮЌТыНУе§ГЬађЩшМЦ 20
5.1.2ЖўЮЌТыЪЖБ№ГЬађЩшМЦ 21
5.1.3ЮяМўЖЈЮЛЫуЗЈЗжЮігыГЬађЩшМЦ 22
5.2ЯТЮЛЛњжїГЬађЩшМЦ 24
5.2.1КьЭтбМЃГЬађЩшМЦ 25
5.2.2ЛњаЕБлЧ§ЖЏГЬађЩшМЦ 26
5.2.3ЮоЯпДЋЪфГЬађЩшМЦ 26
5.3БОеТаЁНс 28
6ЯЕЭГВтЪд 29
6.1ЯЕЭГШэМўВтЪд 29
6.2ЯЕЭГгВМўВтЪд 33
6.3БОеТаЁНс 36
7змНсгыеЙЭћ 37
ВЮПМЮФЯз 38
жТаЛ 40
|
