ЛљгкSTM32ЕФЗРЖЖЩзЩшМЦ(ШЮЮёЪщ,ПЊЬтБЈИц,ТлЮФ13000зж)
еЊ вЊ
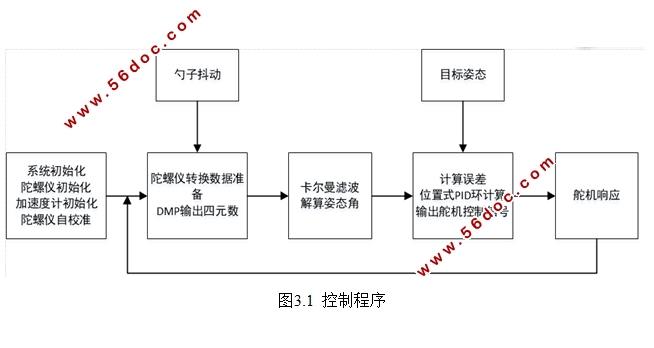
ЩњЛюжадьГЩЪжЗЂЖЖЕФдвђКмЖрЃЌЛМепЛсгЩгкЪжЖЖжЂзДЃЌЕМжТКмФбгУЩззгНјЪГЁЃЖдгкГЃФъвђ“ЪжЖЖ”ФбвдздШчГдЗЙЕФЛМепРДЫЕ ЃЌФмЙЛЗРЖЖЕФЩззгПЩвдЮЊЦфЩњЛюЬсЙЉБуРћЁЃЩззгжївЊгЩвдЯТетМИИіФЃПщзщГЩЃЌяЎЕчГиГфЕчЕчТЗЃЌЕчТЗећЬхгЩЦфЙЉЕчЃЛЕчдДНгПквдМАЩ§бЙЕчТЗЃЛяЎЕчГиЕчСПМрПиЕчТЗЃЛЭгТнвЧгыМгЫйЖШДЋИаЦїЃЛЖцЛњНгПкЁЃИљОнЫФдЊЪ§ЕНХЗРНЧЕФзЊЛЛПЩвдЕУЕНЕбПЈЖћзјБъЯЕЯТЕФзЫЬЌНЧЃЌДгЖјПЩжЊЕРЩззгЕФзЫЪЦЃЌдйРћгУШ§жсМгЫйЖШДЋИаЦївдМАЭгТнвЧРДПижЦЫЎЦНЃЌДгЖјНјааЯћЖЖЁО1ЁПЁЃ
ЕЅЦЌЛњдкМьВтКЭПижЦЯЕЭГжаЕУЕНСЫЙуЗКЕФгІгУЃЌЮЊСЫИјЪЙгУЛМепЬсЙЉЩњЛюБуРћЃЌЮвУЧЩшМЦВЂЪЕЯжСЫвЛжжЛљгкМгЫйЖШМЦКЭШ§жсДЋИаЦїЕФШЫЪжзЫЬЌМьВтЯЕЭГЁЃИФгУШ§жсзјБъЯЕЗНЗЈЃЌЭЈЙ§MPU6050аОЦЌЩЯДЋИаЦїЕУЕННЧЫйЖШжЕЃЌНсКЯзЫЬЌНтЫуЗНЗЈЖдЖцЛњНЧЖШБфЛЏжЕзіГіХаЖЯЃЌЭЈЙ§ПЈЖћТќТЫВЈЦїдйЖдЕУЕНЕФЪ§ОнНјааТЫВЈЃЌВЙГЅЦїЫуЗЈЕжЯћИЩШХЁЃЭЈЙ§ЪЕбщзіГіЪЕЮяЃЌВЂзМШЗВтСПШЫЪжзЫЬЌВЂЖдЩззгНјааздЖЏЗРЖЖПижЦЁЃбаОПЕЅЦЌЛњздЖЏПижЦдкЩњЛюжаЕФгІгУгаЪЎЗжживЊЕФвтвхЁО2ЁПЁЃБОЮФжївЊНщЩмСЫSTM32ЕЅЦЌЛњЪЙгУМгЫйЖШДЋИаЦїMPU6050ЃЌНЋМгЫйЖШаХКХОЙ§ADзЊЛЛБфЮЊЪ§зжаХКХзїЮЊSTM32ЕЅЦЌЛњЕФЪфШыаХКХЃЌШЛКѓЛљгкзЫЬЌНтЫуЗНЗЈЖдаХКХНјааДІРэЃЌНЋЩззгЕФЪЕЪБКуЙіЖЏНЧЯдЪОдквКОЇЦСЩЯЃЌБОЩшМЦдкУшЪіСЫЭтЮЇгВМўЕчТЗЕФЭЌЪБЃЌЛЙзіСЫДѓСПЕФШэМўЙЄзїЃЌАќРЈМгЫйЖШЪ§ОнНјааНЧЖШМЦЫуЃЌPIDПижЦЫуЗЈЁЃБОДЮЩшМЦФмЙЛгааЇЕФЬсИпЕЅЦЌЛњдкЩњЛюжаЕФгІгУГЬЖШЃЌИФЩЦСЫЕчЖЏВЭОпЕФздЖЏЛЏГЬЖШЃЌЪЕгУМлжЕБШНЯИпЁЃ
ЙиМќДЪЃКЕЅЦЌЛњЃЛздЖЏПижЦЃЛМгЫйЖШДЋИаЦїЃЛ
Abstract
There are many causes of shaking hands in life. Patients may experience difficulty with a spoon due to hand-shake symptoms. For those patients who are difficult to eat because of “hand shake” all year round, spoons that can prevent shake can provide convenience for their lives. The spoon is mainly composed of the following modules: a lithium battery charging circuit; the entire circuit is powered by a power supply; a power interface and a boost circuit; a lithium battery power monitoring circuit; a gyroscope and an acceleration sensor; and a servo interface. According to the conversion from quaternion to Euler angles, the attitude angle in Cartesian coordinates can be obtained, so that the posture of the spoon can be known, and the triaxial acceleration sensor and the gyroscope can be used to control the level, so that debounce can be performed.
Microcontrollers have been widely used in detection and control systems. In order to provide convenience for the use of patients, we have designed and implemented a human hand posture detection system based on accelerometers and three-axis sensors. Using the coordinate transformation theory, the roll angle and pitch angle of the attitude are calculated by the acceleration sensor data, and then the azimuth angle is calculated by combining the acceleration sensor data, and the sensor noise and the sensor are affected by the external magnetic field. Through experiments, physical objects are made, and the posture of the human hand is measured accurately, and automatic anti-shake control of the spoon is performed. Therefore, the research on the single-chip microcomputer automatic control system has important purpose and significance. This text mainly introduces STM32 one-chip computer to use the acceleration sensor MPU6050, change the acceleration signal into the digital signal and input the one-chip computer directly, after processing by the one-chip computer, display the real-time roll angle on the liquid crystal screen. PID control algorithm. The design effectively improves the real-time performance and control accuracy of the control system and greatly improves the automation of the living appliances, and has a high practical value
Keyword: Microcontroller; Automatic Control; Acceleration Sensor
ФП ТМ
Ек1еТ аїТл 1
1.1 баОПЕФФПЕФМАвтвх 1
1.2 ЗРЖЖЯЕЭГЕФбаОПЯжзДЗжЮі 1
1.2.1 гУЛЇзЫЬЌЪ§ОнВтСПЗНЗЈ 1
1.2.2 гУЛЇзЫЬЌЪ§ОнДІРэЗНЗЈ 2
1.3 баОПФкШнКЭЗНЯђ 2
1.4 дЄЦкФПБъ 3
Ек2еТ ЗРЖЖЩззмЬхЗжЮігыЩшМЦ 4
2.1 ЗРЖЖЩзжїПижЦЦїНщЩм 4
2.1.1 STM32ИХЪігыМђНщ 4
2.1.2 ФкВПзЪдД 5
2.1.3 Cortex-M3ФкКЫМђНщ 5
2.2 ЙЉЕчЕчТЗЩшМЦ 6
Ек3еТ ЗРЖЖЩзећЬхгВМўЕчТЗЩшМЦ 8
3.1 ЗРЖЖЩзжїЬхЕчТЗЩшМЦ 8
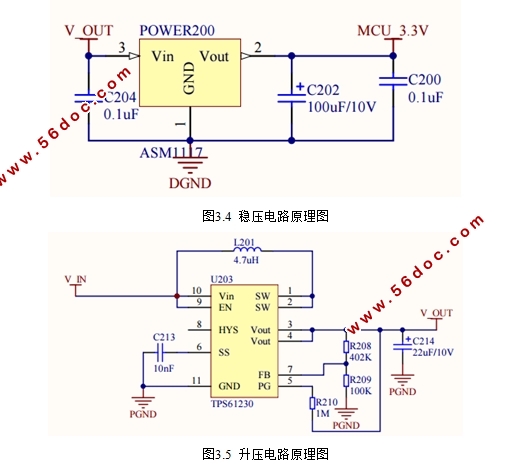
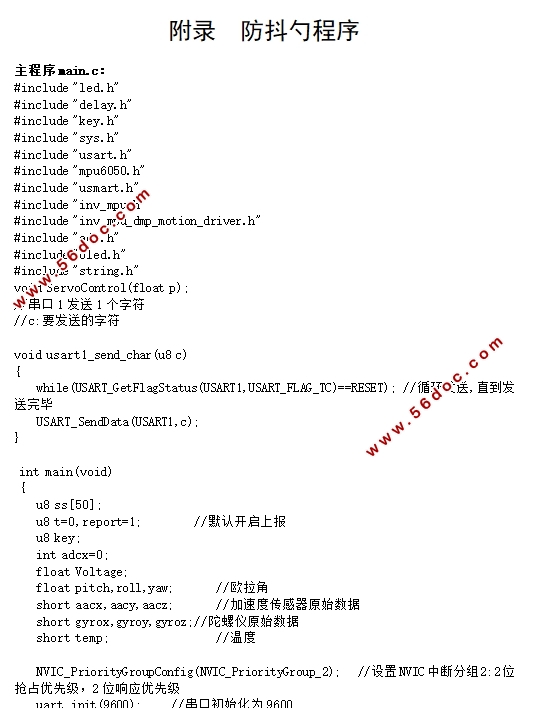
3.2 яЎЕчГиЙЉЕчЕчТЗЩшМЦ 9
3.3 ФПБъзЫЬЌЪ§ОнВЩМЏЕчТЗЩшМЦ 10
4.1 KeilПЊЗЂШэМўНщЩм 13
4.2 жїГЬађ 13
4.3 ЮЛжУЪНPIDЛЗЫуЗЈзгГЬађ 14
4.4 MATLABЗТец 15
Ек5еТ ЪЕЮяКИНггыЕїЪд 16
Ек6еТ змНс 17
ВЮПМЮФЯз 19
ИНТМ ЗРЖЖЩзГЬађ 20
жТаЛ 26
|
