ЙпадДЋИаЦїЖЈЮЛЯЕЭГбаОП
РДдДЃК56doc.com зЪСЯБрКХЃК5D7526 зЪСЯЕШМЖЃКЁяЁяЁяЁяЁя %E8%B5%84%E6%96%99%E7%BC%96%E5%8F%B7%EF%BC%9A5D7526
зЪСЯвдЭјвГНщЩмЕФЮЊзМ,ЯТдиКѓВЛЛсгаЫЎгЁ.зЪСЯНіЙЉбЇЯАВЮПМжЎгУ. Ум БЃ Лн Аяжњ
зЪСЯНщЩм
ЙпадДЋИаЦїЖЈЮЛЯЕЭГбаОП(АќКЌбЁЬтЩѓХњБэ,ШЮЮёЪщ,ПЊЬтБЈИц,жаЦкБЈИц,БЯвЕТлЮФ16000зж)
еЊ вЊЃКеыЖдХЉгУЛњаЕЬиБ№ЪЧФЯЗНЫЎЬяИћзїЛњаЕдкЩњВњзївЕжаЖЈЮЛФбЁЂжЦЕМОЋЖШВЛИпЕФЧщПіЃЌЮЊЪЕЯжЦфЖЈЮЛОЋЁЂздЖЏЛЏГЬЖШИпЕФвЊЧѓЃЌЬсГіСЫвдAT89C51ЕЅЦЌЛњЮЊжабыДІРэЦїКЭЛљгкЪ§зжPIDЕФПижЦЫуЗЈЕФЙпадДЋИаЦїЖЈЮЛЯЕЭГЁЃИУЯЕЭГЭЈЙ§ЙтЕчБрТыХЬКЭЭгТнвЧНјааЪ§ОнВЩбљЃЌШЛКѓжДааЪ§зжPIDПижЦЃЌЪфГіПижЦСПЕїНкжДааЛњЙЙДЅЗЂЖЫЕФЭЈЖЯЃЌДгЖјЪЕЯжЖдзївЕЛњаЕОЋШЗЖЈЮЛЕФПижЦЁЃНсЙћБэУїЃКНЋИУЙпадЖЈЮЛЯЕЭГЭЌЕЅЦЌЛњКЭЪ§зжPIDПижЦЫуЗЈНсКЯЪЙгУЃЌФмЬсИпЯЕЭГЕФЖЈЮЛОЋЖШЃЌДяЕНФЯЗНЫЎЬяИћзїЛњаЕаЁУцЛ§зївЕЕФЖЈЮЛвЊЧѓЁЃ
ЙиМќДЪЃКЖЈЮЛЃЛЙтЕчБрТыХЬЃЛЭгТнвЧЃЛЕЅЦЌЛњЃЛPID
Inertial Sensor Positioning System Research
Abstract: Referring the situation of agricultural machinery, especially southern paddy field farming machinery, having difficulty in positioning and low precision in control, to realize its high precision positioning and high-degree- automation demand, this paper introduce a orientation system of inertia sensor based on the central processor singlechip AT89C51 and digital PID control method. This system samples date through photoelectricity-coding-disk and gyroscope, then carries on a PID control,meanwhile,outputs the control quantity to adjust the angle of flow of administer-machine controlled. Thus the system control precision positioning. The results shows that the orientation system of inertia sensor can increase the precision of positioning of system and achieve the positioning demand of southern paddy field farming machinery small areas of work,through the singlechip and digital PID control method used in combination.
Key words: positioning; photoelectricity-coding-disk; gyroscope; singlechip; PID
1.баОПФПЕФ
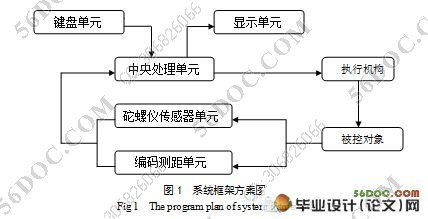
баОПКЭЩшМЦГЩБОИќЕЭЁЂадФмСМКУЕФЙпадДЋИаЦїЖЈЮЛЯЕЭГЁЃ
2баОПФкШнКЭЗНЗЈ
1) МгЫйЖШМЦбЁВФЃЛ
2) НЧЫйЖШДЋИаЦїЃЈЭгТнЃЉбЁВФЃЛ
3) жЦзїЕЅЁЂЫЋЁЂШ§жсзщКЯIMUЃЈЙпадВтСПЕЅдЊЃЉЃЛ
4) зМБИAHRSЃЈАќРЈДХДЋИаЦїЕФзЫЬЌВЮПМЯЕЭГЃЉЃЛ
5) ИїИігВМўЕЅдЊЕчТЗЩшМЦЃЛ
6) ИїИіЕЅдЊШэМўГЬађЩшМЦЁЃ
ЕїбаЪаГЁЩЯЙпадДЋИаЦїЕФгХШБЕу——баОПЙпадДЋИаЦїЕФзмЬхЗНАИ——ЗНАИПЩааадТлжЄЈDЈDИљОнЩшМЦвЊЧѓбЁдёЙпадДЋИаЦїаОЦЌЃЃЩшМЦДцДЂЁЂБъзМДЎПкЭЈаХЕчТЗЕШгВМўЕчТЗЈDЈDЯЕЭГШэМўЩшМЦ——бљЛњжЦзї——адФмЪдбщ——бљЛњИФНј
3.1 ЯЕЭГПђМмНсЙЙЩшМЦ
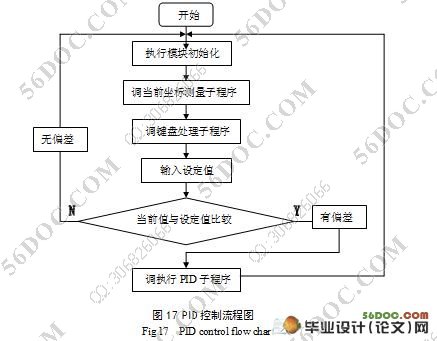
ЙпадДЋИаЦїЖЈЮЛЯЕЭГАќРЈгВМўЕчТЗКЭШэМўЩшМЦВПЗжЁЃгВМўЕчТЗВПЗжжївЊАќРЈжабыДІРэЕЅдЊЁЂБрТыВтОрЕЅдЊЁЂЭгТнвЧДЋИаЦїЕЅдЊЁЂжДааЕЅдЊЁЂМќХЬЕЅдЊМАЯдЪОЕЅдЊЕШЁЃгЩБрТыВтОрЕЅдЊКЭЭгТнвЧДЋИаЦїЕЅдЊЪЕЪБЖдЛњаЕЕФЫйЖШЁЂЮЛвЦКЭКНЯђНјаааХЯЂВЩМЏЃЌОзЊЛЛКѓАбЪ§ОнДЋЫЭИјжабыДІРэЦїЃЌжабыДІРэЦїНјааЗжЮіДІРэКѓЃЌЭЈЙ§Ъ§зжPIDПижЦЫуЗЈНЋжИСюЫЭШыжДааЛњЙЙНјааЛњаЕЕФааНјПижЦЃЌВЂдкЯдЪОЕчТЗНјааЪ§ОнЯдЪОЁЃ
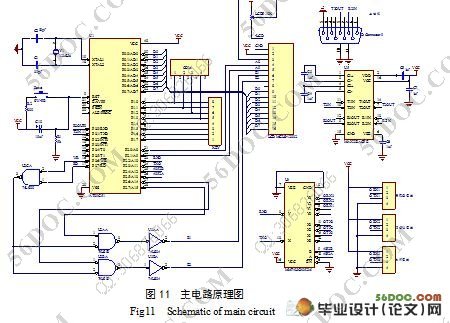
ШэМўВПЗжжївЊЭъГЩаХЯЂВЩМЏЃЌВЂгЩAT89C51ЕЅЦЌЛњЖдБрТыВтОрКЭНЧЫйЖШДЋИаЦїЭгТнвЧЕФЯрЙиЪ§ОнНјааЗжЮіЃЌНЋЕУГіЕФЪ§ОнНсЙћгыЩшЖЈжЕНјааБШНЯЃЌВЩгУPIDПижЦЫуЗЈЖджДааЛњЙЙЪЕЯжПижЦЃЌБЃжЄЖЈЮЛОЋЖШЁЃ
3.2 ЖЈЮЛЪдбщЦНЬЈНсЙЙзщГЩ
ТжЪНГЕСОгаЖржжНсЙЙаЮЪНЃЌГЃгУЕФгаШ§ТжГЕСОКЭЫФТжГЕСОЃЌЯрБШНЯЖјбдЃЌЫФТжГЕСОНсЙЙИДдгЃЌЩшМЦЪдбщжмЦкГЄЃЌЫљвдБОЩшМЦВЩгУзджЦЕФЧАТжЧ§ЖЏВЂПЩзЊЯђЕФШ§ТжаЁГЕНјааЪдбщбаОПЁЃ
ШчЯТЭМ2ЫљЪОЕФЪдбщаЁГЕЪЕЮяЭМЃЌЪдбщгУЕФаЁГЕЮЊЧАТжЧ§ЖЏЁЂзЊЯђВЂжЦЖЏЃЌКѓТжЫцЖЏаЭЁЃЪдбщаЁГЕгЩГЕМмКЭПижЦЦїзщГЩЃЌПижЦЦїВПЗжАќРЈжабыДІРэЕЅдЊЁЂДЋИаЦїЕЅдЊЁЂжДааЕЅдЊЁЂМќХЬКЭЯдЪОЕЅдЊЕШЁЃ
ФП ТМ
еЊвЊ…………………………………………………………………….….................I
Abstract…………………………………………………………………….….........II
1аїТл………………………………………………………………….….................x
1.1бЁЬтвРОнвдМАбЁЬтвтвх……………………………….………….……….x
1.1.1 бЁЬтвРОн……………..……………………………………………….x
1.1.2 бЁЬтвтвх……………..……………………………………………….x
1.2ЙњФкЭтбаОПЯжзДМАЗЂеЙЧїЪЦ………………………………...………..…...x
1.2.1 ЙњФкбаОПЯжзДМАЗЂеЙЧїЪЦ…………………….………...……….…...x
1.2.2 ЙњЭтбаОПЯжзДМАЗЂеЙЧїЪЦ…………………….………...……….…...x
1.3 БОПЮЬтЕФбаОПФкШнЁЂЗНЗЈвдМАдЄЦкГЩЙћ……………………………..….x
1.3.1 баОПФкШн…………………………………………….……….…….….x
1.3.2баОПЗНЗЈ……………………………………………..………….….….x
1.3.3 дЄЦкГЩЙћ…....……………………………………...………………….x
2 ЧАбд…………………………………………………………….….…x
2.1баОПБГОАКЭЫМТЗ………………………………………………...…………..
3 змЬхЗНАИЩшМЦ………………………………………………………......…….x
3.1 ЯЕЭГЩшМЦ……………………………………...………..…...x
3.1.1 ЯЕЭГПђМмНсЙЙЩшМЦ………………………………………...…..x
3.1.2 ЖЈЮЛЪдбщЦНЬЈНсЙЙзщГЩ…………………..…….…..………....…....x
4 ЖЈЮЛдРэЩшМЦ…………………………………………………….………..…….x
4.2БрТыХЬВтОр……………………………………………………..….…...x
4.2.1 БрТыХЬВтОрЗНАИдРэЩшМЦ…………………..……………………..…..x
4.2.2 БрТыХЬВтОрЗНАИбЁдёКЭЪ§ОнЗжЮі..……………………………….....x
4.3ЭгТнвЧВтНЧЖШ………………………………………….……………..….…..x
4.3.1 ЭгТнвЧЕФЗжРрКЭдРэ………………………………………….….……x
4.3.2 ЭгТнвЧВтНЧЖШдРэ……………………………………………….….…x
4.3.3 ЭгТнвЧВтНЧЖШЪдбщКЭЪ§ОнЗжЮі…………………………….………x
5 ШэМўЗНАИЩшМЦ……………………….…………………………….….…x
6 гВМўЗНАИЩшМЦ……….……...…………......……………………..…...x
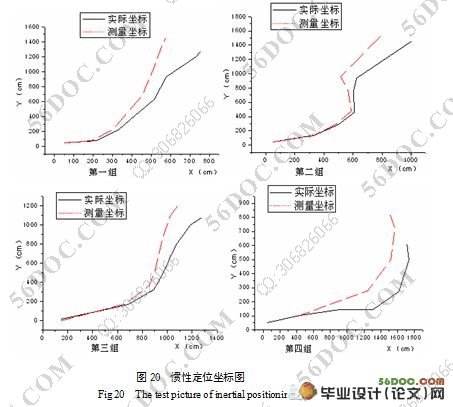
7 ЙпадЖЈЮЛЪдбщКЭЪ§ОнЗжЮі………..………….....…….x
НсТл…………………………………………………………………………...……...x
ВЮПМЮФЯз………………………………………………………………...…...………x
жТаЛ……………………………………………………………………...…...………x
ИНТМ…………………………
ИНТМ
ИНТМ1ЃКжїЕчТЗдРэЭМ
ИНТМ2ЃКБрТыХЬФЃПщЕчТЗдРэЭМ
ИНТМ3ЃКЭгТнвЧФЃПщЕчТЗдРэЭМ
ИНТМ4ЃКжДааФЃПщЕчТЗдРэЭМ
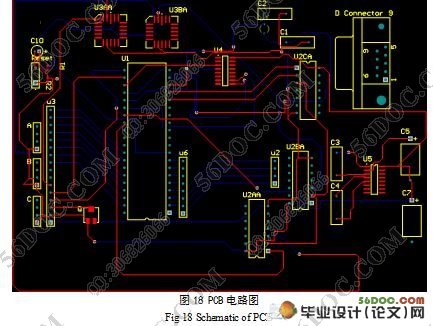
ИНТМ5ЃКЕчТЗPCBЭМ
|