自动目标追踪激光发射装置系统设计
来源:56doc.com 资料编号:5D7550 资料等级:★★★★★ %E8%B5%84%E6%96%99%E7%BC%96%E5%8F%B7%EF%BC%9A5D7550
资料以网页介绍的为准,下载后不会有水印.资料仅供学习参考之用. 密 保 惠 帮助
资料介绍
自动目标追踪激光发射装置系统设计(包含选题审批表,任务书,开题报告,毕业论文14000字)
摘 要:近些年来激光定位技术得到了长足的发展,由于其高单色性、高方向性、相干性好,相比于其他定位手段的独特优势,已经成为定位技术方面不可或缺的工具。自动目标追踪激光发射装置在遥控小车的应用中是个很重要的环节,通过激光定位,可以得出遥控小车的位置坐标。这是遥控小车工作的前提和基础。不同的环境中存在不同的状态,即其定位误差根据环境不同而改变,所以需要对周围环境的所有影响因素进行分析,如果定位误差超过所允许的误差,必须考虑并对其进行校正。
关键词:激光;定位;步进电机
Design of Laser for Automatical Object Tracking System Launcher
Abstract: The laser positioning technology has got considerable development in the last few years because of the high monochromaticity , high directionality, good coherence, comparing with the unique advantage to the means of other position, and has already become an indispensably tool in positioning technology. Automatic target tracking laser transmitter applicated in remote car is a very important part of laser positioning, position coordinates of remote control car can be drawn. This is the premise and foundation of a remote control car. There are different states followed by different environments, that the positioning error changes according to different environment, so all the factors influenced by the surrounding environment will be analysis. Positioning error is more than the error allowed by the system, it must be considered and corrected.
Keyword: laser; position ; stepping motor
整体结构设计
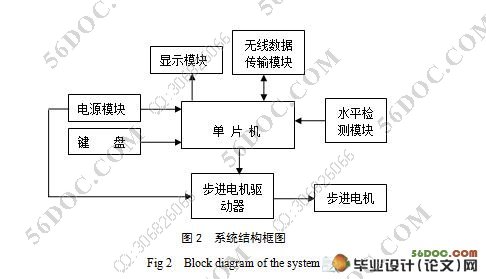
整个装置由单片机、步进电机、步进电机驱动器、无线数据传输模块、水平检测模块、电源模块、显示模块等几部分组成。利用单片机控制步进电机驱动器并带动步进电机转动和无线数据传输模块通讯;电源模块提供电源,供步进电机驱动器和其他芯片工作;无线数据传输模块用于小车进行无线通讯。结构框图如图2所示。
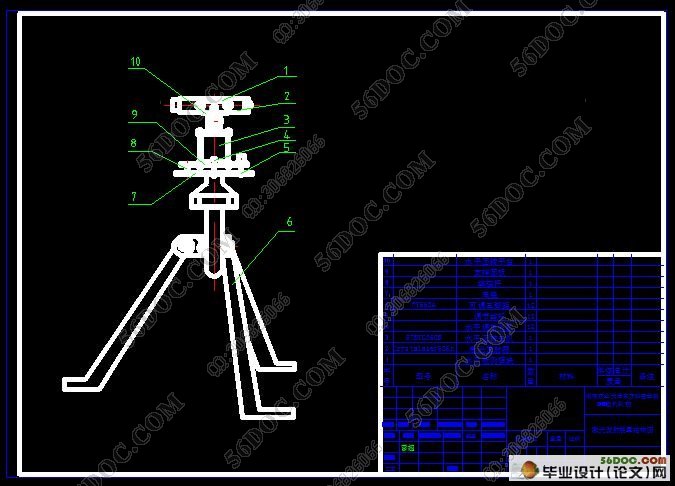
整个系统固定在高度可调的三角架上,激光发射器安装在水平转动平台上,水平转动平台通过水平回转电机的带动可以在水平面上来回转动,而水平回转电机自带的水平回转角度测量模块可以测量水平回转角度,用于计算激光接收器所在的载体——试验小车的位置坐标。水平回转电机、水平调节电机与支撑圆板固接,支撑圆板和底座是通过一根连接杆和二根丝杆连接的,三根杆分布在以圆板的圆心为中心的等边三角形的三个顶点上,其中连接杆下端和底座固接,上端和支撑圆板铰接,丝杆下端与底座通过螺纹连接,上端与水平调节电机的轴固接。控制部分的水平回转电机和水平调节电机,是通过高精度步进电机和单片机实施控制的。
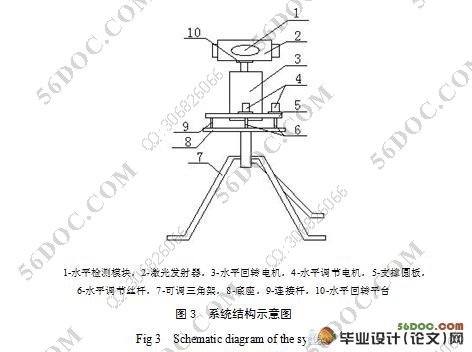
各个部分作用如下:
(1) 水平检测模块:检测激光发射装置是否水平,已发射符合要求的水平激光。
(2) 激光发射器:发射激光,以便激光接收器接收后实现定位。
(3) 水平回转电机:带动水平回转平台转动,实现发射不同角度的激光。
(4) 水平调节电机:带动丝杆旋转。
(5) 支撑圆板:用来支撑水平调节电机和水平回转电机。
(6) 水平调节丝杆:用来调节激光发射器的水平。
(7) 可调三脚架:可调节激光发射装置水平与高度。
(8) 底座:安放其他器件装置。
(9) 连接杆:连接底座和支撑圆板。
(10) 水平回转平台:安装水平检测模块和激光发射器的回转平台。
将各个部件进行组合装配,做出实物,如图4所示。
2.研究内容和方法
1)电机固定平台设计;
2)激光旋转平台设计 ;
3)光固定平台设计 ;
4)光发射器旋转控制。
研究自动目标追踪激光发射装置的总体方案——方案可行性论证――根据设计要求选择相关元器件——设计电机固定平台、激光旋转平台、光固定平台――完成激光发射器旋转控制的设计——样机制作——性能试验——样机改进
目 录
摘要............................................................... 1
关键词............................................................. 1
1 前言............................................................. 2
1.1 选题背景..................................................... 3
1.2 自动追踪目标激光发射装置的研究意义........................... 3
1.2.1 激光测距仪在军事领域上的应用............................. 3
1.2.2 激光测距仪在工业领域上的应用............................. 3
1.2.3 激光测距仪在遥控小车上应用............................... 3
1.3 自动追踪目的研究现状......................................... 4
2 激光三点定位原理..................................................4
3 系统结构设计..................................................... 6
3.1 整体结构设计................................................. 6
3.2 激光发射器的选用............................................. 8
3.3 步进电机的选用............................................... 9
3.3.1 概述..................................................... 9
3.3.2 工作原理................................................. 9
3.3.3 一些基本参数.............................................10
3.3.4 驱动控制系统组成........................................ 10
3.3.5 步进电机的选用.......................................... 11
3.4 单片机的选用................................................ 12
3.4.1 概述.................................................... 12
3.4.2 单片机的选用............................................ 12
3.5 本章小结......................................................14
4 系统硬件软件设计................................................14
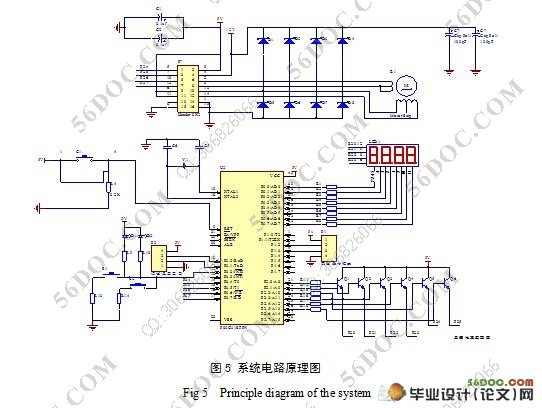
4.1 系统硬件设计................................................ 15
4.2 系统软件设计................................................ 16
4.2.1 水平调节电机的控制程序.................................. 16
4.2.2 水平回转电机的控制程序.................................. 16
4.2.3 数据采集发送的控制程序.................................. 17
4.3 本章小结.................................................... 18
5 算法研究与误差分析.............................................. 19
5.1 激光追踪算法................................................ 19
5.2 单片机运算误差分析.......................................... 20
5.3 本章小结.................................................... 23
6 实验验证与结果.................................................. 23
6.1 实验方案.................................................... 23
6.2 激光三点静态定位实验数据.................................... 24
6.3 本章小结.................................................... 26
7 设计总结........................................................ 26
参考文献 ......................................................... 27
致谢...............................................................28
附录...............................................................28
|